






 レーザ・光関連製品Webガイド レーザ、オプトエレクトロニクスの最新製品をご紹介します。
レーザ・光関連製品Webガイド レーザ、オプトエレクトロニクスの最新製品をご紹介します。

Science/Research 詳細
ロボットのハチ、レーザの眼を得て飛行と水泳が可能に
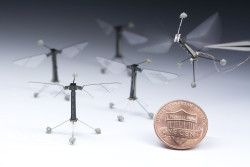
October, 26, 2015, Buffalo--バッファロー大学(UB)の研究チームによると、眼として機能する微小なレーザパワーのセンサを装備することでロボットの昆虫、微小マシーンは、近づいてくる物体のサイズ、形状、距離を感知できるようになる。
「自動車メーカーが、無人車両が衝突しないように利用するのと本質的に同じ技術だ」とバッファローコンピュータセンタ研究者、Karthik Dantuは言う。「われわれにとって必要なことは、1ペニー程度のロボットのハチで機能するようにその技術を縮小することだ」。
UBの研究プロジェクトは、全米科学財団から110万ドルの助成を受けており、このプロジェクトにはハーバード大学、フロリダ大学が参加している。これはハーバードおよびノースイースタン大学が主導したRoboBee構想からの派生。同構想は、昆虫からインスピレーションを得たロボットの実現を目標としている。これは、いずれ農業や災害救済で利用される可能性がある。
研究チームは、ロボットビーの繋留飛行や水中動作能力を示した。しかし、問題の1つは、奥行き検知が欠如していること。例えば、ロボットのハチは前方にあるものを感知できない。
ロボットが壁に突っ込むことを避けたり、花に着陸させたりしようとすると、この点が問題になる。
UBの研究チームは、ロボットビーにlidarというリモートセンシング技術を実装することでこの限界に対処する、lidarは無人車両を可能にするのと同じレーザベースのセンサシステム。
lidarはレーダーと同じように機能するが、マイクロ波の代わりに不可視レーザビームを放射する。ビームは、遠隔の物体からの反射光を捉える。すると、センサは光が戻ってくるまでの時間を計測し、物体の距離と形状を計算する。
その情報は、コンピュータアルゴリズムで解析され、車輌の経路のコヒレント像を形成する。これによって車は、その周囲環境を見て、交通信号に従い、障害物を回避し、その他の調整ができるようになる。
このようなシステムは、一般には車の屋根に搭載されているが、一般的なキャンピングランタン程度の大きさがある。研究チームは、それを遙かに小さい「マイクロlidar」バージョンで実現しようとしている。
フロリダ大学の研究チームは、光の反射を計測する微小センサを開発、一方Dantuは新しい感知、ナビゲーションアルゴリズムを作る。これによつてロボットが周囲世界を処理しマッピングすることができる。ハーバードの研究チームは、その技術をロボットビーに実装する。
研究チームが開発する技術は、ロボットの昆虫に限定されるものではない。そのセンサは、ウエアラブル技術、内視鏡ツール、スマートフォン、タブレットや他のモバイル機器でも使用可能である。



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
