






 レーザ・光関連製品Webガイド レーザ、オプトエレクトロニクスの最新製品をご紹介します。
レーザ・光関連製品Webガイド レーザ、オプトエレクトロニクスの最新製品をご紹介します。

Science/Research 詳細
タンポポからヒントを得た光駆動飛行ロボット
February, 22, 2023, Tampere/Washington--多年草として知られるタンポポは、どこにでもあるが、不快な雑草として知られている。タンポポは、上昇気流や風を利用して、100kmを超える広範囲に広がる。これは、その白い房状種子によるものである。
その粗末なタンポポの種からヒントを得てフィンランドとドイツの研究者は、風による分散、離陸、着陸ができる光制御、軟体ロボットを開発した。ワイヤレス制御、小型デバイスは、広い空中空間をナビゲートできる。潜在的なアプリケーションは、過酷環境、危険な環境におるセンシングなど。
自然からインスピレーションを得る
フィンランド、タンペレ大学、Light Robotsグループリーダー、Hao Zengは、数年前から光駆動スマート材料に基づいたシステムに取り組んでいる。同氏の研究室は、歩き、泳ぐことさえできるロボット作製のために刺激応答性、形状変形ポリマのプログラム可能変形を活用した。新しい研究では、研究チームは、応答性材料研究でまだ達成されてない最先端、飛行への取組を目標にした。
「われわれは、生物からヒントを得た適応機能を備えた小型、光駆動飛行ロボットを開発するために、FAIRY (Flying Aero-robots based on Light Responsive Materials Assembly)というプロジェクトを始めた」(Zeng)。
タンポポの種の構造を模擬した最初の設計は、円形構造における剛毛フィラメントで囲まれた光駆動ソフトアクチュエータで構成されている。アクチュエータは、液晶エラストマでできており、可視光エネルギー(532-1nm固体レーザまたは460-nmLED光源 )を吸収し、それを熱に変換する。材料の熱膨張異方性により、それが曲がるので、剛毛を開閉して飛行が容易になる。
離陸と着陸
そのロボットには、いくつかの生体模倣機能がある。高気孔率、軽量構造(1.2mg)、風があるときの分離した渦リング構造。この点は、受動的分散には重要である。人工および自然のタンポポの種は、0.5m/s程度の最終自由落下速度である。
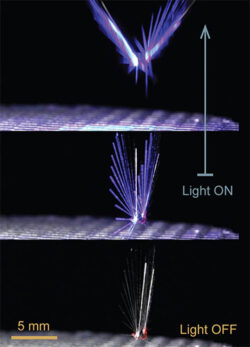
研究チームは、風洞で、そのロボットのウインドアシスト離陸と着陸のデモを行った。折り畳んだ構造は、開いた構造と比べて、離陸開始には強い風速を必要とする。チームは、光折り畳みデバイスを風洞に設置し、光を消した。するとロボットは直ぐに開き、離陸した。アクチュエータの曲げ方向を変えることで、そのメカニズムは逆にも動作することが可能。光“on”は分散、 光“off”は離陸のようにである。
チームの次のロボット設計では、もっと意欲的な目標として、翼を持つ複雑な飛行種、蝶や鳥などを模擬することである。
「自然の飛行種で最も簡単なステップを考える。離陸に翼で羽ばたく。これを無生物材料で再現できるか。これを達成することは、マイクロロボットやスマート材料研究における大きな進歩となる。それがわれわれの次のステップである」とZengは話している。



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
