






 レーザ・光関連製品Webガイド レーザ、オプトエレクトロニクスの最新製品をご紹介します。
レーザ・光関連製品Webガイド レーザ、オプトエレクトロニクスの最新製品をご紹介します。

Science/Research 詳細
スタンフォード研究者、雲や霧を透過してみる方法を考案
September, 17, 2020, Stanford--スタンフォード大学の研究者は、X線なしだが、一種のX線ビジョンを開発した。自律走行車が周囲の世界を見ることができるのと同様のハードウエアで、研究チームは高効率アルゴリズムによりそのシステムを強化した。個々の光粒子、つまりフォトンの動きに基づいて隠れたシーンを3D再建できる。
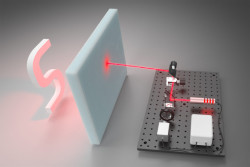
Nature Communicationsに発表されたテストでは、同システムは、1インチ厚の泡で見えなくされた形状を再構成することに成功した。人の眼には、それは壁を通して見ているようである。
スタンフォード大学電気工学准教授Gordon Wetzsteinは、「これは実際、いかなる種類のセンシングシステムでも可能になることに新開地を開く。超人間的な視覚のようだ」とコメントしている。
この技術は、医療応用の顕微鏡スケールで障害を見通せる他の視覚システムを補完する。と言うのは、より大きなスケールの状況に注目しているからである。例えば、霧や大雨の中の自律走行車のナビゲート、霞んだ大気を通して地球表面や他の惑星のサテライトイメージング。
散乱光からのスーパーサイト
四方八方に光を散乱させる環境を通して見るために、そのシステムは、レーザと、届いたすべてのレーザ光を記録する超高感度フォトンディテクタを組み合わせている。レーザが泡の壁のような障害をスキャンすると、不定期のフォトンがその泡を透過しようとし、その背後に隠された物体に当たって、泡を透過して戻り、ディテクタに届く。アルゴリズムにサポートされたソフトウエアが、その少ないフォトンを使い、つまりディテクタのどこに、いつ当たったかについての情報を使い、隠された物体を3Dで再構成する。
これは、散乱環境を通して隠された物体を明らかにできる初のシステムではないが、他の技術に関連する限界を回避する。例えば、他のシステムの中には、関心のある物体がどの程度離れているかについての知識を必要とするものもある。これらのシステムは、一般に、弾道フォトンからの情報使うだけである、それらは散乱領域を通して隠された物体へ、また物体から移動するフォトンであるが、その途上では実際には散乱していない。
「われわれは、こうした仮定なしで散乱媒体を通してイメージングできることに関心をもっており、散乱させられた全てのフォトンを集めて像を再構成できることに興味を抱いていた。このため、われわれのシステムは大規模アプリケーション、弾道フォトンが僅少なところで特に役立つ」と論文の主筆、電気光学院生、David Lindellは説明している。
そのアルゴリズムを散乱の複雑さに従うようにするために研究チームは、ハードウエアとソフトウエアを共同設計しなければならなかった。ただし、チームが使用したハードウエアコンポーネントは、現在、自動運転車に搭載されているものよりほんのわずかに進んでものである。隠された物体の明るさに依存して、チームのテストにおける散乱は、1分から1時間の時間がかかったが、アルゴリズムは、隠されたシーンをリアルタイムで再構成し、ラップトップで走らせることができた。
いずれ、このシステムの後裔が宇宙に送られ、他の惑星や月で、氷に覆われた雲を通して深い層や表面を見るために役立つ。近い将来では、研究チームは、異なる散乱環境を実験して、この技術が役立つ他の環境をシミュレートする考えである。



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
