






 レーザ・光関連製品Webガイド レーザ、オプトエレクトロニクスの最新製品をご紹介します。
レーザ・光関連製品Webガイド レーザ、オプトエレクトロニクスの最新製品をご紹介します。

Science/Research 詳細
MIT、サブテラヘルツイメージング
April, 5, 2019, Cambridge--光ベースの画像センサに依存する自律走行車は、霧などの盲目条件では視界で苦労することがある。とは言え、MITの研究チームは、従来の方法が機能しないようなときの無人自動車の操作に役立つサブテラヘルツ照射受光システムを開発した。
サブテラヘルツ波は、電磁スペクトルのマイクロ波と赤外放射の間にあり、霧や塵雲を通して簡単に検出できる。一方、自律走行車で利用されている赤外ベースのLiDARイメージングシステムは苦労する。対象を検出するために、サブテラヘルツイメージングシステムは、トランスミッタから最初の信号を送り、次に戻ってくるサブテラヘルツ波の吸収と反射をレシーバが計測する。それが信号をプロセッサに送り、対象物の画像が再現される。
しかしサブテラヘルツセンサの無人自動車への実装は簡単ではない。高感度、正確な対象認識は、レシーバからプロセッサへの強力な出力ベースバンド信号を必要とする。従来のシステムは、そうした信号を生成するディスクリートコンポーネントでできているが、大きく、高価である。より小さなオンチップセンサアレイは存在するが、それらは弱い信号しか出力しない。IEEE Journal of Solid-State Circuitsに発表された論文でMITの研究チームは、桁違いに高感度のオンチップ2D、サブテラヘルツレシーバアレイを報告している。つまり、これは、多くの信号雑音の中でもサブテラヘルツ波の取得と解析が一段と優れていることを示している。
これを達成するために研究チームは、独立したシグナル・ミキシングピクセル、「ヘテロダインディテクタ」スキームを実行した。これは、通常、チップに高密度集積が非常に難しい。研究チームは、ヘテロダイディテクタのサイズを飛躍的に縮小し、多数がチップに収まるようにした。この仕掛けは、コンパクトな多目的コンポーネントを造ることであった。同コンポーネントは、入力信号を同時にダウンミックスし、ピクセルアレイを同期し、強力な出力ベースバンド信号を作ることができる。
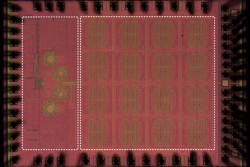
研究チームは、1.2平方ミリデバイスに32ピクセルアレイを集積したプロトタイプを作製した。ピクセルは、今日の最高オンチップ・サブテラヘルツアレイセンサのピクセルよりも約4300倍高感度である。もう少し開発が進むと、チップは無人自動車や自律ロボットで使える可能性がある。
「この研究の大きな動機は、自律走行車やドローン向けにより優れた“電子の眼”を持たせることである」と電気工学・コンピュータサイエンス准教授、MITマイクロシステム技術研究所(MTL)テラヘルツ集積エレクトロニクスグループ長、Ruonan Hanはコメントしている。「われわれのローコスト、オンチップ、サブテラヘルツセンサは、環境が荒れているとき、LiDARで補完的な役割を果たす」。
分散デザイン
設計のキーは、研究者たちの言う「分散」である。この設計では、シングルピクセル、つまり「ヘテロダイン」ピクセルが周波数ビートと「局部発振」(LO)を生成する。LOは入力周波数の周波数を変える電気信号。この「ダウンミキシング」プロセスが、ベースバンドプロセッサで簡単に読み取れるメガヘルツ域の信号を作り出す。
出力信号を使って対象物の距離を計算する。LiDARが、対象物に当たって戻るレーザの時間を計算するのと同じ方法である。加えて、ピクセルアレイの出力信号を統合し、一定の方向でピクセルを操作すると、場面の高分解画像が可能になる。これにより、対象の検出だけでなく、認識も可能になる。つまり、自律走行車やロボットでは極めて重要である。
ヘテロダインピクセルアレイは、全ピクセルからのLO信号が同期する時にのみ機能する、つまり信号同期技術が不可欠である。集中設計は、LO信号を全てのピクセルが共有するシングルハブを含む。
このような設計は、通常は低周波のレシーバで使用され、サブテラヘルツ周波数帯域では問題の原因となる。その場合、シングルハブからの高出力信号の生成が極めて難しいからである。アレイを拡大するに従い、各ピクセルが共有するパワーが低下し、出力ベースバンド信号強度が低下する、これはLO信号の出力に大きく依存している。その結果、各ピクセルが生成する信号は非常に弱く、感度が低下する。オンチップセンサの中には、この設計を使い始めたものもあるが、8ピクセルが限界である。
研究チームの非集中デザインは、このスケールと感度のトレードオフに取り組んでいる。各ピクセルが独自のLO信号を生成し、入力信号の受信とダウンミキシングに利用される。加えて、集積カプラが、そのLO信号を隣のLO信号と同期させる。これにより各ピクセルは出力が高まる。LO信号が、グローバルハブから流れないからである。
しかし新しいアーキテクチャは、潜在的に各ピクセルのフットプリントを著しく大きくする。これは、アレイ方式の大規模、高密度集積には大きな問題となる。設計では、研究チームは、従来別れていた様々な4機能、アンテナ、ダウンミキサー、発振器、カプラを単一の「多重タスク処理」コンポーネントに統合し、各ピクセルに与えた。これにより32ピクセルの分散デザインが可能になる。
「われわれは、チップ上の分散設計で、多機能コンポーネントを設計し、いくつかの個別構造を統合して各ピクセルサイズに圧縮する。各ピクセルが複雑な作業をするとしても、それはコンパクトである、したがってわれわれはまだ、大規模高密度アレイを利用できる」とHuは話している。
周波数によるガイド
システムが対象物の距離を計測するには、LO信号の周波数が安定的でなければならない。
そのために、研究チームはチップに、フェーズロックトループを組み込んだ。これは、32LO信号のサブテラヘルツ周波数を安定した低周波リファレンスに固定する。ピクセルは結合されているので、そのLO信号はすべて、同一の高安定位相と周波数を共有する。これは、意味のある情報が出力ベースバンド信号から引き出せることを保証している。このアーキテクチュア全体が信号ロスを最小にし、コントロールを最大にする。
「要するに、われわれは、コヒレントアレイを達成している、同時に各ピクセルで非常に高いLOパワーも達成してるので、各ピクセルが高感度になっている」とHuは話している。
(詳細は、http://news.mit.edu)



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
