






 画像処理製品WEBガイド 画像処理、マシンビジョンシステムの最新製品をご紹介します。
画像処理製品WEBガイド 画像処理、マシンビジョンシステムの最新製品をご紹介します。Science/Research 詳細
ロボットに役立つ目のイメージング技術
April, 6, 2022, Durham--デューク大学の研究者によると、ロボットが網膜を備えた目を持っていないとしても、世界をより自然に、安全に見る、相互作用するのに役立つカギは、眼科で一般に見られるOCTマシーンにある。
多くのロボットメーカーがセンサパッケージに組み込んでいるイメージング技術の1つが、LiDARである。現在、自動運転車開発社が注目し、投資しているが、そのアプローチは、基本的にレーダーのように機能する。しかし、ブロードな電波を送る代わりに、反射を見る、つまりそれはレーザからの短パルス光を利用するのである。
しかし、従来のTOF LiDARは、多くの欠点があることから、多くの3D画像アプリケーションで利用するのは困難である。それは、微弱な反射光信号の検出を必要とするので、他のLiDARシステムあるいは環境の太陽光でさえ、そのディテクタを簡単に圧倒する。また、深さ分解能に限界があり、ハイウエイや工場フロアなどの大きなエリアを高密度スキャンするには恐ろしく時間がかかる。こうした課題に取り組むために研究者は、周波数変調連続波(FMCW) LiDARというLiDARの一形式に眼を向けている。
「FMCW LiDARは、OCTと同じ動作原理を共有している。OCTは、生体医用工学分野が、1990年代早期から開発してきたものである」とJoseph Izatt研究所のPh.D学生、RuobingQianは、話している。「しかし30年前には、誰も自動車、ロボットがものになるとは知らなかったので、その技術は組織のイメージングに焦点を当てていた。現在、これら他の新しい分野でそれらを利用できるようにするには、その非常に高い分解能を、距離とスピードを増やすようにトレード必要がある」。
Nature Commuicationsに発表された論文でデュークチームは、OCT研究から学んだわずかな仕掛けが、以前のFMCW LiDARデータスループットを、サブミリメートル奥行き精度を達成しながら、25倍改善できることを実証している。
OCTは、超音波の光アナログである。超音波は、音波を対象に送り、戻るまでにかかる時間を計測する。光波の戻る時間を計測するためにOCTデバイスは、その位相が、同じ距離を進んだが他の物体と相互作用していない同じ光波と比較してどの程度シフトしたかを計測する。
FMCW LiDARは、少しの微調整で同じアプローチを採用している。その技術は、様々な周波数で連続的にシフトするレーザビームを送出する。ディテクタが光を収集して、その反射時間を計測すると、特定の周波数パタンと他の光源との区別ができるので、それはあらゆる種類の露光条件で非常に高速に動作可能である。したがって、妨害のないビームに対して、いかなる位相シフトでも計測する。これは、現在のLiDARシステムよりも非常に正確な方法で距離を測定する。
「われわれが何10年も取り組んできた生体の細胞スケールイメージング技術が、大規模なリアルタイム3Dビジョンに転換可能であることを見るのは、とても感動的である。これらは正しく、ロボットが見たり、ヒトと安全に相互作用し、あるいは拡張現実(AR)のライブ3Dビデオでアバターさえも置き換えるために必要な機能である」(Joseph Izatt)。
LiDARを使うほとんどの以前の研究は、レーザによる景色スキャンに回転ミラーに依存していた。このアプローチは良好に機能するが、使用しているレーザがどんなに強力でも、基本的に機械的ミラーのスピードに制約される。
デュークの研究チームは、代わりに、プリズムのように機能する回折格子を利用する。レーザは多種多様の周波数に分かれ、光源から送出されるに従い広がる。基のレーザは、一連の周波数でなおも素早く掃引しているので、これは、LiDARビームを機械的ミラーの回転よりもはるかに高速に掃引することになる。これによりシステムは、奥行き、位置の正確さを失うことなく、広い範囲を素早くカバーすることができる。
OCTデバイスは、対象内深く数㎜まで微細構造をプロファイルするために使用されるが、ロボット3Dビジョンシステムはヒューマンスケールの物体の表面を見るために必要なだけである。これを達成するために研究者は、OCTで使われる周波数範囲を狭くし、物体の表面から生成される信号ピークを見つけるだけにした。これはシステムの分解能をわずかに失わせるが、従来のLiDARよりもイメージング範囲とスピードが大幅に大きくなる。
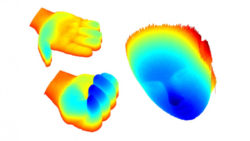
成果は、以前のデモンストレーションと比べて、サブミリメートルの定位精度、25倍のデータスループットを達成するFMCW LiDARシステムである。また、そのアプローチが動くヒトの身体部分、うなずく頭、握りしめる手などの細部をリアルタイムで捉えることができるほどに高速かつ正確であることを示している。
「エレクトロニクスカメラがユビキタスになっているのと同様に、われわれのビジョンは、新しい世代のLiDARベース3Dカメラの開発である。3Dビジョンをあらゆる種類の製品に組み込むことができるほど高速な3Dカメラである。われわれの周囲の世界は3Dであるので、われわれがロボットや他の自動システムと自然に、安全に相互作用したいなら、それらは、われわれがそれらを見るのと同じようにわれわれを見ることができなければならない」とIzattは話している。
(詳細は、https://pratt.duke.edu)



![]()
関連雑誌:Vision Systems DESIGN, Vision Systems DESIGN China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.