






 画像処理製品WEBガイド 画像処理、マシンビジョンシステムの最新製品をご紹介します。
画像処理製品WEBガイド 画像処理、マシンビジョンシステムの最新製品をご紹介します。Science/Research 詳細
自動車がコーナーの危険を見ることができる新しいレーダ
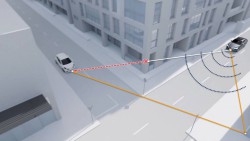
July, 31, 2020, Princeton--プリンストン大学の研究チームは、レーダを使って、自動車がコーナーに現れる車、迫り来る歩行者を見つける自動システムを開発した。
同システムは、今日の車輌に簡単に組み込むことができ、ドップラレーダを使って、ビルや駐車車両の表面から無線波を跳ね返らせる。そのレーダシステムは、一定の角度で表面に当たるので、反射は、プールテーブルの壁に当たるキューボールのように跳ね返る。信号は、コーナーに隠れた物体に当たり、無線信号の一部は、車載ディテクタに戻ってくるので、同システムはコーナーの周りの物体を見たり、それらが動いているか静止しているかを判断できる。
「これにより自動車は、今日のLiDARやカメラセンサが記録できないような、遮られた物体を見ることができる・例えば、自動運転車は、危険な交差点の周りを見ることができる。レーダセンサは、特にLiDARと比べると、相対的に安価であり、量産可能である」とコンピュータサイエンス准教授、Felix Heideは説明している。
Computer Vision and Pattern Recognition (CVPR)会議で発表された論文で研究チームは、自動車、サイクリスト、歩行者を含む物体を同システムがどのように区別し、方向や向かってくる速度を計測するかを説明した。
「提案されたアプローチは、既存の直線的な見通し線シナリオで発見する前に、実世界の自動運転シナリオで歩行者やサイクリストに衝突警告を発することができる」と論文は説明しいる。
近年、エンジニアは、自動車が路上で他の物体を検出できる様々なセンサシステムを開発してきた。その多くはLiDARやカメラに依存するものであり、可視光あるいは近赤外光を利用している。衝突を防止するそのようなセンサは、最近の自動車では一般的になっている。しかし、光学センサを、自動車の見通し線外の物を見つけるために利用することは難しい。
研究チムは、可視光の代わりにイメージングレーダを使って自動車の見通し線外の危険を検出するシステムを実現できるかどうかを検討した。滑らかな表面では信号損失は、レーダシステムでは著しく低い。また、レーダは物体の追跡では実証された技術である。問題は、レーダの空間分解能である。自動車やバイクなど、コーナー周辺の物体を画像化するには、空間分解能が相対的に低い。とは言え、チームはレーダデータを解釈するアルゴリズムを作成して、そのシナリオを機能させることができると考えていた。
「われわれが開発したアルゴリズムは非常に効率的であり、現行世代の自動車ハードウエアシステムに適合している。したがって、この技術は、すでに次世代自動車に適しているとわれわれは考えている」(Heide)。
システムが物体を区別できるようにするために、Heideのチームは、標準的なレーダが、有用な情報ではなく背景雑音と考えるレーダ信号の一部を処理した。チームは、人工知能技術を適用して、処理を改善し、画像を読み取れるようにした。コンピュータ科学院生、論文の主筆、Fangyin Weiは、「同システムを走らせるコンピュータは、非常に少ないデータからサイクリストや歩行者を認識することを学習しなければならなかった」とコメントしている。
「まず、そこに何かがあるかどうかを検出しなければならない。あるなら、それが重要であるのか。サイクリストか歩行者か。つぎに、それを見つけ出さなければならない」(Wei)。
Weiによると、同システムは現在、歩行者とサイクリストを検出する。エンジニアの見方では、それらは、小さく、形状が多様であり動いているので、最も難しい物体である。さらに、同氏は、同様に自動車も検出できるように調整できた、と説明している。
研究チームは、多くの方向で研究を継続する計画である。レーザと信号処理の改善の両方に関わるアプリケーションの研究である。同システムは、自動車の安全を根本的に改善する可能性がある。それは既存のレーダセンサ技術を利用するので、次の世代の自動車では同システムの導入は可能になる。
(詳細は、https://www.princeton.edu)



![]()
関連雑誌:Vision Systems DESIGN, Vision Systems DESIGN China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.