






 画像処理製品WEBガイド 画像処理、マシンビジョンシステムの最新製品をご紹介します。
画像処理製品WEBガイド 画像処理、マシンビジョンシステムの最新製品をご紹介します。Science/Research 詳細
製造現場でのロボットの自律的な作業を実現するAI技術を開発
September, 2, 2019, 大阪--産業技術総合研究所(産総研)人工知能研究センターは、大阪大学(阪大)、中部大学(中部大)と共同で、新エネルギー・産業技術総合開発機構(NEDO)「次世代人工知能・ロボット中核技術開発」プロジェクトにおいて、自動化が困難な製造現場での作業である部品供給と組み立て作業へのロボット導入を容易にするAI技術を開発した。
この技術には、絡み合う部品の供給技術、道具を使う組み立て作業の計画技術、視覚に基づく作業の高速化技術を含む。2019年8月29日より順次、開発成果のソフトウエアを公開する。これらの技術を基に、複雑な作業工程による生産ラインの設計の効率化と作業時間の短縮を図る。
研究の内容
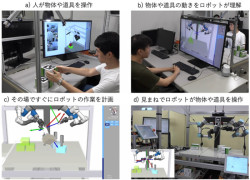
道具を使う組み立て作業の計画技術: 見まねによる即時教示・道具操作
ロボットに複雑な組み立て作業を教えるには、プログラムの専門家が、膨大な労力と時間をかける必要があった。今回、人がカメラの前で組み立て作業を実演し、ロボットがその場ですぐに見まね(模倣)する手法を開発した。従来教示のために必要であったロボットに対する高い専門知識を必要としないため、組み立て作業をおこなう製造現場の作業者が、普段の手作業を実演するだけで、ロボットが自律的にその作業を模倣する。具体的には、従来は、人が1-2日かけて教示していたドライバーを使ったネジ締め作業など、道具を使った細かな組み立て作業を、数分の実演をすれば、ロボットが学習し、すぐにその場でロボットが作業を実行できる。組み立て作業の事前行動計画に要する作業時間やプログラム作業を削減できる。
視覚に基づく作業の高速化技術: 物体操作のための視覚情報を効率的に圧縮・復元
ロボットが物体をつかむ際には、ロボットの視覚機能で得た画像から物体をつかむ位置を計算する必要がある。この計算時間は、作業中の待ち時間に直結するため、速度をいかに速められるかが重要である。今回、視覚機能を持つロボットハンドからの画像データの行列分解に基づく効率的な圧縮・復元処理を開発し、把持位置検出のための計算時間を削減した。市販の一般的な把持位置検出処理に適用すると、同手法に要する計算時間を最大1/3 まで短縮できた。これにより、ロボット作業の高速化が期待できる。
(詳細は、https://www.aist.go.jp)


![]()
関連雑誌:Vision Systems DESIGN, Vision Systems DESIGN China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.