





Science/Research 詳細
精密標的薬剤デリバリに微小ロボット
July, 22, 2022, Stanford--スタンフォード医療エンジニアは、ヘルスケアを精密標的薬剤デリバリに近づける微小ロボットを開発している。
胃痙攣から頭痛まであらゆる病状を治そうと同じ丸い錠剤を飲んだことがあるなら、薬剤は必ずしも正確な痛みのポイントに対処するようにはデザインされていないことがすでに分かっている。錠剤は、数十年にわたり多くの症状を治してきたが、生体医療研究者は、心臓血管疾患、ガンなど複雑な症状の処置で、標的化された薬剤デリバリを改善する方法を探求し始めたばかりだ。
この急拡大するバイオメディカル領域での有望なイノベーションが、ミリロボットである。這い、スピンし、泳いで狭いスペースに入っていく。ミッションは内部構造の探査、あるいは投薬である。
この分野の有数の研究、スタンフォード大学機械工学のRenee Zhaoは、多くのミリロボットの同時設計に取り組んでいる。これには磁気クローリングロボットが含まれている。これは、先頃、Science Advancesで胃まで這って進むのが観察された。磁界を動力源としており、これにより連続運動が可能になり、即時のトルク生成に適用でき、ロボットの動き方を変えることができる。そのロボットは、様々な移動状態を自己選択し、身体の障害を克服できる。磁界の強さと方向を変えるだけでZhaoのチームは、一度の飛躍でそのロボットの長さの10倍の距離をロボットを進めることができる。
研究の重要側面、磁気作動は非侵襲的操作の制御をワイヤレスにし、デバイスから制御ユニットを分離して微小化を可能にする。Nature CommunicationsでZhaoは、最新のロボットの特徴を「これまで開発した中で最も堅牢で多機能な、繋がれていないロボット」と説明している。
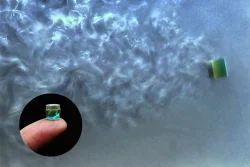
この新しい「スピンできるワイヤレス水陸両生オリガミロボット」は、その名の示すとおり多機能である。それはうまく考案された単一ユニットで、臓器のツルツルした面、凹凸面をスピーディに進み、体液を泳いで進み、液剤を保持しながらワイヤレスに進む。飲み込む薬剤、あるいは注入される液剤と違い、このロボットは、薬剤を保持し、「標的に達して初めて高濃度薬を放出する。それが、われわれのロボットが標的薬剤デリバリを達成する方法である」とZhaoは説明している。同氏は、機械工学准教授。
薬剤デリバリを再形成
この特別な水陸両用ロボットで画期的なことは、それがほとんどのオリガミベースのロボットの設計を超えていることだ。それは、オリガミの折り畳み機能をロボットの変形し動く仕方の制御に利用するだけだ。
折り畳みがロボットにある動作をどのようにさせられるかだけではない。アコーデオンの折り畳みが薬を絞り出すことを考えている。Zhaoのチームは、各ヒダの正確な形状が、折り畳まれていないときに、ロボットの剛体運動にどのように影響を与えるかも考えた。結果として、そのロボットの開いた形状が本質的に周囲の状況を進む推進力になる。そのような偏見のない考察によって研究チームは、容積を増やすことなく材料を十分に活用できた。また、Zhaoの世界では、ロボット設計の単純構造から達成される機能が多ければ多いほど、医療処置の侵襲性はますます少なくなる。
そのロボット設計のもう1つのユニークな側面は、一定の形状特性の組合せである。ロボットの真ん中の縦穴と側面の角度をつけた横方向のスリットが水抵抗を減らし、ロボットの泳力に役立っている。「この設計は、ロボットの速く泳ぐための負圧を誘発し、同時にカーゴーのピックアップと輸送のための吸引となる。われわれは、この小さなロボットの形状特性を十分に活用し、様々なアプリケーションや異なる機能に向けてその簡素な構造を探求している」(Zhao)。
小さく、シンプルであればあるほどよい
Zhaoのようなミリロボットを実際のヘルスケアで見るのは、より適切な設計について知り、ベストの実用がイメージできてからであるが、同研究所のその種のモノで最初のスイマーは、Nature Communicationsに取り上げられている。
(詳細は、https://news.stanford.edu)


![]()
