





Science/Research 詳細
オリガミからヒント、手術ロボットのサイズを縮小
September, 23, 2020, Cambridge--侵襲性の少ない腹腔鏡手術では、小さな切開に挿入されたツールと微小カメラを使って医者が手術を行う。これは過去半世紀、患者と医者の両方にとって外科手術の安全性を高めた。最近、多数のツールを同時に、従来技術よりも一段と高精度、柔軟に操作、制御することで外科医をさらにアシストする医療ロボットが手術室に現れるようになった。しかし、これらのロボットシステムは、非常に大きく、部屋全体を占めることがあり、そのツールは、手術する繊細な組織や構造よりも遙かに大きい。
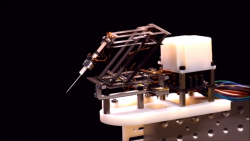
SEASのRobert WoodとSonyのロボット工学者Hiroyuki Suzukiの協力により、オリガミからヒントを得た新しい微小モーションマニピュレータリモートセンタ(mini-RCM)を作ることで外科ロボットを微小スケールにできた。ロボットはテニスボールサイズ、重量は1べーにー程度、Nature Machine Intelligenceの説明にあるように、難しい模擬外科手術を難なくこなした。
「マイクロロボットを造るWood研究室のユニークな技術能力が、過去数年、多くの素晴らしい発明につながった。医療マニピュレータの分野でもブレイクスルーの可能性があった。このプロジェクトは大成功だった」と、2018年、ハーバードとSonyの協力の一環として、mini-RCMについてWoodと協働を始めたSuzukiは語っている。
ミクロタスクのためのミニロボット
微小な手術ロボットを造るために、研究チームは、Woodの研究室で開発されたPop-Up MEMS製造技術を利用した。同技術では、材料が交互に堆積されて相互に接着された層を形成する。次に、所望の3D形状が「ポップアップ」するように特殊パタンにレーザ切断する。子供のポップアップ絵本のようである。この技術は、小さく複雑な構造の量産を著しく簡素にする。他の方法では、手作業で苦労して構築しなければならない。
チームは、ロボットの主要構造に使うために平行四辺形形状を作成しロボットの動きを制御するために3つのリニアアクチュエータ(mini-LAs)を造った。一つは、上下する平行四辺形の底に平行なもの、それ回転させる平行四辺形に垂直なもの、さらに使用するツールを延ばしたり引っ込めたりする平行四辺形先端の一つ。結果は、学界で以前に開発された他の微小手術機器よりも遙かに小さく、軽量なロボットだった。
mini-LAs自体は,驚くほど小さく、電界を印可すると形状を変える圧電セラミック材料の周りに構築されている。その形状変化は、線路の列車のように、レールユニットに沿ったmini-LAsのランナーユニットを押し動かす。ロボットは、そのリニア運動を利用して動く。圧電材料は形を変えると本質的に、変形するので,チームはLEDベース光センサをそのmini-LAに組込み、手ブレが原因で起こるような、所望の動きからのどんな逸脱も検知し、補正する
医者の手よりも安定
遠隔操作手術の条件を模倣するためにチームは、mini-RCMをPhantom Omniデバイスに接続した。これは、ペンのようなツールをコントロールするユーザの手の動きに応じて、mini-RCMを操作した。その最初のテストは、ボールペンの先端よりも小さな微小方形をトレースする人の能力を評価し、顕微鏡を覗き、手動でそれをトレースするか、あるいはmini-RCMを使用してそれをトレースするかのいずれかを行った。mini-RCMをテストは、ユーザの正確さを著しく改善し、手動操作と比較して誤りを68%低減した。小さくて繊細な人体の構造の修復に必要とされる精度を考えると、これは特に重要である。
とれいしんぐテストでのmini-RCMの成功を前提として、研究チームは次に、網膜静脈挿管という外科手術の模擬バージョンを作製した。この場合、外科医は、眼を通して慎重に針を挿入し、眼球背後の微細血管に治療薬を注入しなければならない。チームは、網膜静脈と同サイズのシリコーンチューブを造り、mini-RCM先端に取り付けた針でそれに穴を開けることに成功した。局所的損傷、破壊は起こらなかった。
繊細な外科手術における有効性に加えて、mini-RCMの小サイズには、もう一つの重要な利点がある。セットアップやインストールが容易である。混乱あるいは停電の場合、ロボットは簡単に患者の身体から手動で除去できる。
「Pop-Up MEMS法は、小さいが高度な機械を必要とする多くの領域で価値あるアプローチであることが証明されており、手術の安全性と効率を高める可能性が分かり、大変満足している」(Wood)。
研究チームは、ロボットのアクチュエータの力を強くして、手術中に経験する最大力をカバーし、その位置決め精度を高めようと考えている。また、加工プロセスで短パルスレーザを使い、mini-LAsのセンシング分解能を向上させる研究も行っている。
(詳細は、https://www.seas.harvard.edu)


![]()
