





Science/Research 詳細
手術応用に近づくカリバチに触発された針
February, 15, 2016, London--神経外科では、現在医師はカニューレと言う細く硬い中空の針を脳に挿入することで薬剤を輸送し、液体を流す。カニューレの硬い構造は、それを真っ直ぐに挿入しなければならないことを意味しており、柔らかくて変形する脳組織の変化する性質には適応できない。つまり、カニューレの挿入は正確ではなく、患者にとっては危険性が増す。
インペリアルカレッジ・ロンドン(Imperial College London)の研究チームは木に穴をあけるハチからヒントを得てロボット針のプロトタイプを開発した。これは柔軟で曲がるので、組織の奥深く、到達しにくいところに達することが可能である。現在、チームは、欧州委員会(EU)から830万ユーロの助成金を受け、4年プロジェクトで、脳外科で薬剤送達用に針を使うロボットツールを開発する。
プロジェクトEDEN2020では、学術、臨床医、産業界のチームが前商用システムを開発し、臨床試験を2020年末に始めることができるように予定している。
そのロボットシステムはまず、現在、通常の処置に対する反応が良くない脳腫瘍への薬剤送達のために設計されている。しかし、研究チームは、同システムが広範な医療処置にも適用できると考えている。例えば、小線源療法。この場合、放射線シードを針により癌性腫瘍に送ることができる。レーザアブレーションは光ファイバを使ってガン性組織を焼き払うようにレーザを向ける。また、脳深部電気刺激法では、パーキンソン病のような震えに関連する疾患の処置に電極を実装することも可能だ。ロボットの針は、ラマン分光を使って分子レベルで体を分析し、ガン細胞や病変組織の発見にも使える。
自然からヒントを得た
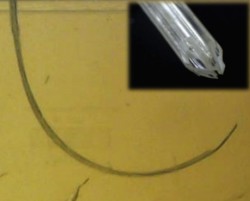
プロトタイプの針は、雌の寄生ハチからヒントを得ている。そのハチは、曲がる針のような産卵管を使って木に穴を開け、隠れた寄生幼虫に散乱する。その技術は、最小限3つの小さな連結したポリマシャフトでできている。これらは相互に並んでスライドし、産卵管の動作法を真似ている。セグメントは複雑なパタンで動き、周辺組織に対する針の影響を最小化しており、これまでにない巧みさで曲路に沿って動く。
インペリアルの機械工学部、Dr Ferdinando Rodriguez y Baenaは、「6年のプロジェクトで、現在医療グレード、臨床サイズの使えるプロトタイプが実現している。最終的には、結果を改善し、脳腫瘍の患者の回復時間を改善したい」とコメントしている。
研究チームの究極的な目的は、プロトタイプシステムによって外科医が、手術ロボットを使い、最先端の医療センサとイメージング技術によってプロセスをモニタしながら手術を行うことができるようになることである。
ロボット針は、ロボットアームに実装される。これによって患者の頭で正確な位置決めができるようになる。同システムは、医師にしたがって針の挿入をインテリジェントにガイドする。医師は、触角のようなジョイスティックで針をコントロールする。ここには感覚キューがあり、目標に向かって挿入を確実にする。
プロトタイプの針は、それが組織に沿って動く際にその形状がどのように変化するかを感知し、この情報は中央コンピュータに送られて処理される。それは、患者の脳の3Dスキャンに一致する。これは、患者の頭に置いた微小な超音波機器でリアルタイムに取り込まれる。これにより、治療のための目標ゾーンに届くように、医師はコンソールで視覚的にロボットの進行を追跡することができる。それが目標に到達すると、薬剤は針の中空シャフトから放出される。


![]()
