








Science/Research 詳細
SEAS,ロボット関節の最適化
February, 26, 2026, Cambridge--Harvard SEASの研究チームは、転がり面と柔軟なコネクタからなるロール接触継手の設計最適化のための数学的枠組みを開発した。
この方法を示すために、標準的な機構と比べてズレを99%減少させる膝状関節と、従来の設計グリッパの3倍の重量を支えられるロボットグリッパを開発した。
人間の膝の驚くべき物理学を考えてみる。体で最大のヒンジ関節であり、2本の丸い骨が靭帯でつながれており、靭帯は扉のように揺れるだけでなく、互いに転がったり滑ったりすることで、膝が曲げたり伸びたりバランスを取ったりできる。
Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS)の研究チームは、ロボットの膝のような関節をローリングコンタクトジョイントと呼ばれる新しい設計方法を考案した。これにより、より良いロボットグリッパ、人間に適したよりカスタマイズされた補助装置、動物のように優雅に動くロボットの開発が期待されている。
この新しい設計アプローチは、コンピュータ上でローリングコンタクトジョイントの設計を最適化するもので、『全米科学アカデミーProceedings』に掲載された。これは、ロボットグリッパの先端や人間に似たロボットの付属肢など、望ましい力や作用に合わせて関節の各主要部品の形状を同時に調整することで実現される。
「ロボットがあり、何をすべきかのイメージができれば――例えば歩くロボット――力を発揮する最適な場所を考え始めることができる。歩いているものなら、例えば歩幅の終わり近くで押し出すためにもっと力を入れた方がいいかもしれない。もしこれらの決定をロボット自体の仕組みに組み込めれば、より効率的なロボットを作れる。エネルギーが特定の場所に向けられるため、より小さなアクチュエータが使える」と、SEASのPh.D学生、この研究の筆頭著者、Colter Deckerは説明している。
「われわれはロボット設計をタスクや制御と密接に結びついたものと考えようとしている」と、Harry Lewis & Marlyn McGrath工学・応用科学教授、論文の上級著者であるRobert J. Woodは話している。「できるだけ多くのモーションコントロールをロボットの機械や素材に委ね、制御システムがタスクレベルの目標に集中できるようにしたいと考えている。Colterの方法はまさにそれを成し遂げており、数学的にも機械的にも非常に洗練された方法で実現している。」
グリッパープロジェクトからの着想
関節設計の改良というアイデアは、Wood研究室での別のプロジェクト「物体を優しく巻きつつ強い力を加えられるソフトロボットグリッパの作り方」に触発された。
剛性のあるリンクと柔らかく柔軟な関節を組み合わせる方法を模索した彼らは、ローリングコンタクトジョイント(曲面が互いに転がり合い、柔軟なコネクタで固定されるもの)に注目した。
ロボティクスでは、関節の動き方を決めることは通常、ソフトウェアや制御アルゴリズムによって処理される。この新しいアプローチでは、これらの選択が各関節の幾何学的設計に影響を与える。
ベアリングや4-barリンクは既存のロボットでより広くジョイントとして使われているが、ローリングコンタクトジョイントは柔軟性、低摩擦、高い耐摩耗性といった独自の利点を持ち、特定のアプリケーションにおいて有利な選択肢であるとDeckerは続けた。
プロトタイプ膝関節、グリッパ
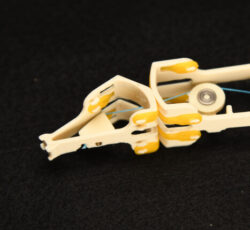
新しい設計手法を示すために、チームは膝のような関節と二本指のロボットグリッパという2つのプロトタイプを製作した。
膝の補助装置や外骨格は、膝の近くに単純なベアリングを設置することが多く、実際の膝はヒンジで動くだけでなく、ずれたり、転がったり、滑ったりするため、手間のかかるずれが生じることがある。人間の膝の平均経路をマッピングし、研究チームは新しい手法を用いて、実際の膝の動きに密接に沿った最適化されたローリングコンタクトジョイントを作り出した。チームはカスタムデザインのジョイントと標準的なものを比較した。
最適化された関節は標準機器と比較して99%もずれを修正するという驚異的な性能を発揮した。その結果、膝のブレースや外骨格、さらには関節置換術などが、個人の関節の動きに合わせて調整される未来が期待できる可能性を示している。
試作ロボットグリッパで、指が物体の大きさに応じて最大限の力を発揮できるように関節を最適化した。そのグリッパは、同じアクチュエータ入力用に標準的な円形ジョイントとプーリーで作られたバージョンの3倍以上の重量を支えることができた。
従来のローリングコンタクトジョイントは円形の表面から作られるが、Harvardチームの新しい数学的手法により、非円形で不規則な形状が異例の経路をたどることが可能である。
「われわれはたくさん計算してみた。もし関節に特定の望ましい軌道があって、その軌道に沿った特定の力伝導比があれば、その特性を示す面や滑車を見つけられるか」(Decker)。
「そうすれば、その設計プロセスを応用して、歩行やジャンプ、掴みなどの作業に適した関節を最適化できる。」
Deckerによると、人間に似た関節を様々なアプリケーションで最適化できることは、タスク特化ロボットから補助ロボット工学、動物の生体力学研究に至るまで、多くの探求の道を開く。「今や関節の設計ができたので、これらすべての異なるシナリオに適用し始められる」。



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
