








Science/Research 詳細
人工腱が筋肉駆動型ロボットの性能向上に貢献
December, 8, 2025, Cambridge--MITのエンジニアによる新設計は、多くのバイオハイブリッドの建造を可能にした。
われわれの筋肉は自然のアクチュエータである。腱組織が体を動かす力を生み出す。近年、技術者たちは実際の筋肉組織を用いて、生きた組織と合成部品の両方から作られた「バイオハイブリッド(biohybrid)ロボット」を操作している。研究室で育てられた筋肉と合成骨格を組み合わせることで、研究者たちは筋肉力で動くクローラー、ウォーカー、スイマー、グリッパーの多彩な動物群を設計している。
しかし、これらの設計はほとんどの場合、動作や出力に制限がある。現在、MITの技術者たちは人工腱を使ってバイオボットにパワーリフトを与えようとしている。
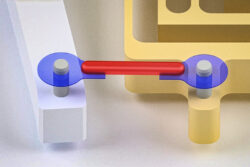
Advanced Science誌に掲載された研究によると、研究チームは丈夫で柔軟なハイドロゲルから作られた人工腱を開発した。チームはゴムバンドのような腱を、小さなラボで育てられた筋肉の両端に取り付け、「筋腱ユニット」を形成した。次に、各人工腱の端をロボットグリッパーの指につなげた。
中央筋を収縮させると、腱がグリッパーの指を一緒に引き寄せた。ロボットは同じ設計の腱を使わないものと比べて、指を3倍の速さで、30倍の力でつまんだ。
研究チームは、この新しい筋腱ユニットが、ユニバーサルエンジニアリング要素のように幅広いバイオハイブリッドロボット設計に適合できると展望している。
「われわれは人工腱を、筋肉アクチュエータとロボット骨格の間の交換可能なコネクタとして導入している」と、MITの機械工学助教授、筆頭著者のRitu Ramanはコメントしている。「このようなモジュール性は、マイクロスケールの外科用器具から適応型自律型探査機械まで、幅広いロボット応用の設計を容易にする可能性がある。」
筋肉の成果
RamanとMITの同僚たちは、過去10年で登場した比較的新しい分野であるバイオハイブリッドロボティクスの最前線に立っている。チームは合成構造的なロボット部品と生きた筋肉組織を自然なアクチュエータとして組み合わせることに焦点を当てている。
「エンジニアが通常扱うほとんどのアクチュエータは、小型化が非常に難しい。ある大きさを超えると、基本的な物理法則は機能しない。筋肉の良いところは、各細胞が独立したアクチュエータであり、力を発生させ動きを生み出すことである。つまり、原理的には本当に小型のロボットを作ることができる」(Raman)。
筋アクチュエータには他にも利点があり、Ramanのチームはすでにそれを実証している。運動することで組織が強くなり、怪我をしても自然に治癒できる。これらの理由から、チームは筋肉質ドロイド(droid)がいつか人間にとってあまりにも遠隔か危険な環境を探査するために送り出されるかもしれないと想像している。筋肉質なボットは予期せぬ移動に備えて力を蓄えたり、助けがつかないときに自らを回復したりできる。バイオハイブリッドボットは、体内で繊細で微小な処置を行う小型の外科助手としても機能する可能性がある。
これらすべての未来のシナリオが、Ramanや他の研究者たちに生きた筋肉と合成骨格を組み合わせる方法を模索する動機となっている。これまでの設計では、筋肉の帯を伸ばし、両端を合成骨格に取り付ける方法があり、輪ゴムを2本の柱に巻きつけるのに似ている。筋肉が収縮するよう刺激されると、骨格の各部分を引き寄せて望ましい動きを生み出すことができる。
とは言え、Ramanによれば、この方法は多くの筋肉の無駄を生み出し、それが組織を骨格に固定するために使われ、動かすために使われている。よって、そのつながりが必ずしも確実とは限らない。筋肉は骨格構造に比べてかなり柔らかく、その違いが筋肉の裂けたり剥離したりする原因になることがある。さらに、実際には筋肉の中心部の収縮だけが働くことが多いが、その収縮は比較的小さく、力もほとんど生み出さない。
「筋肉の無駄遣いをやめて、もっとモジュール化して何にでも取り付けられるようにし、もっと効率的に機能させるにはどうすればいいか考えた。体が考え出した解決策は、筋肉と骨の中間に硬い腱を持たせることだ。これにより、柔らかい筋肉と硬い骨格の間の機械的な不一致を橋渡しできる。細いケーブルが関節に効率的に巻きつくようなものだ」(Raman)。
「スマートに接続」
Ramanと同氏のチームは、新しい研究で、自然な筋肉組織と合成グリッパ骨格をつなぐ人工腱を設計した。チームが選んだ素材はハイドロゲルで、柔らかく丈夫なポリマベースのジェルだった。RamanはMITでハイドロゲルの開発を先駆けてきた同僚で共著者のXuanhe Zhaoからハイドロゲルサンプルを入手した。Zhaoのグループは、合成材料や生物材料を含む多くの表面に付着できる、強度や伸縮性が異なるハイドロゲルのレシピを導き出している。
人工腱がどれほど強く伸縮性があるべきかを考えるために、Ramanのチームはまず、中央筋肉、2本のつながる腱、そしてグリッパ骨格を表す3種類のスプリングからなるシンプルなシステムとして設計をモデル化した。チームは以前に知られていた筋肉と骨格に一定の剛性を割り当て、それを使ってグリッパを望む量だけ動かすために必要な接続腱の剛性を計算した。
このモデリングから、チームは一定の剛性を持つハイドロゲルのレシピを導き出した。ゲルが作られると、研究チームは慎重に細いケーブルにエッチングし、人工腱を形成した。チームは、実験室標準の技術で培養した小さな筋肉組織の両端に2本の腱を取り付けた。次に、各腱をロボットグリッパの指先にある小さなポストに巻きつけた。これは精密機械の設計と製作に詳しい機械工学教授Martin Culpepperによって開発された骨格設計である。
チームが筋肉を収縮させると、腱がグリッパを引っ張り指をつんだ。複数の実験を通じて、研究チームは筋肉腱グリッパが、筋肉組織のバンドだけで(人工腱なしで)作動する場合と比べて、3倍の速さで働き、30倍の力を生み出すことを発見した。新しい腱ベースの設計は、7,000サイクル、すなわち筋肉収縮でもこの性能を維持することができた。
全体として、Ramanは人工腱の追加によりロボットのパワーウェイトレシオが11倍に増加し、同じだけの作業をするのにはるかに少ない筋肉で済むことを見抜いた。
「骨格に賢く接続された小さなアクチュエータの部品が必要なだけだ。普通、筋肉がとても柔らかくて抵抗の強いものに付着していると、動かす前に自分で裂けてしまう。しかし、裂けにくい腱のようなものに付ければ、その力を腱を通じて伝わることができ、普段は動かせなかった骨格を動かすことができる」(Raman)。
ETH-Zurichの健康科学・技術准教授でもある生体医工学者のSimone Schürle-Finkeによると、チームの新しい筋腱設計は生物学とロボティクスを見事に融合させている。
「硬いハイドロゲル腱はより生理的な筋肉・腱・骨の構造を作り出し、力の伝達、耐久性、モジュール性を大幅に向上させる」と、研究には関わっていないSchürle-Finkeはコメントしている。「これにより、繰り返し動作し、最終的には研究室外でも機能するバイオハイブリッドシステムへと分野が進んでいる。」
新しい人工腱が導入されたことで、Ramanのチームは皮膚のような保護カバーなど、実用的な実用的な環境で筋肉駆動ロボットを可能にするための他の要素の開発に向けて前進している。



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
