








Science/Research 詳細
ソフトロボット用新型アクチュエータの非線形ダイナミクスをAIで学習
November, 4, 2025, 東京--東京大学大学院情報理工学系研究科のタ デゥックトゥン(Tung D. Ta)助教と、同大学大学院工学系研究科カレメル セドリック(Cedric Caremel)特任助教と川原圭博教授、テキサス大学、リバプール大学らの研究グループは、ソフトロボットの駆動装置(アクチュエータ)として有望視される「液体相変化パウチアクチュエータ」の制御において、その複雑な挙動を高精度に予測する新手法を開発した。
このアクチュエータは、過去の動作履歴に挙動が左右される複雑な物理現象(ヒステリシスのため、高精度な制御が極めて困難だった。この研究では、この物理現象を逆手に取り、AI技術「リザバーコンピューティング(時系列データの処理に特化した機械学習手法の一つ)」を応用した独自フレームワーク「PhysRes(Physical Hysteretic Reservoir)」によって、アクチュエータの変形状態をデータから高精度に予測する新手法を開発。これにより、ロボットの身体(物理系)そのものが情報処理を行うという、新しい計算アプローチを実証した。
研究手法と成果
この課題に対し、研究では、この履歴に依存する複雑な物理現象を逆手に取り、アクチュエータの状態を高精度に予測する新しい手法を開発した。
この解決の鍵となったのが、「リザバーコンピューティング」というAI技術の一分野である。特に今回用いられたのは、研究チームが以前に考案した、独自のフレームワーク「PhysRes」である。
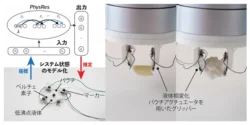
この研究で開発されたアクチュエータは、ナイロン製のシートをパウチ状に加工し、内部に低沸点の液体を封入したものである。四隅に取り付けたペルチェ素子で加熱することで液体を気化させ、その体積膨張を駆動力とする。この一連の動作中、まず、パウチ表面に設置した複数のマーカーの三次元位置をモーションキャプチャシステムで高精度に追跡する。PhysResは、アクチュエータの動きを表す時系列の位置座標データを入力とする。この手法は、まず入力された全ての座標データを一つに連結し、「状態行列」を構築する。さらに、この行列の前半部分(現在の状態)を用いて、時間的に未来にあたる後半部分を予測するようにモデルを訓練する。これにより、過去の履歴に依存するヒステリシスのような複雑な振る舞いを、現在の状態から未来を予測するという問題設定で効果的にモデルへ組み込んでいる。
最終的に、この「状態」を入力として、アクチュエータの振る舞いを支配する抽象的な内部状態(潜在空間)を、単純な「線形回帰」という手法によってモデルを学習する。
開発されたモデルは、アクチュエータの動的な状態を高い精度で予測することに成功した。これはアクチュエータの時々刻々と変化する形状を、モデルが正確に再現できることを示している。さらに研究チームは、この技術の実用性を証明するため、開発したアクチュエータを搭載したソフトロボットグリッパーを製作した。このグリッパーは、柔らかいまるめたティッシュや、極めて壊れやすいポテトチップスを、その形状を損なうことなく把持し、持ち上げることに成功した。
今後の展望
この研究の意義は、単一のアクチュエータ制御技術に留まらず、ロボットの身体そのものが情報処理を担う「身体性計算」という新たな概念を具現化した点にある。このアプローチは、将来的に、素材自体が環境を認識し、学習・判断する「計算する素材(Computational Materials)」の実現に繋がるものである。
研究チームは既に、アクチュエータが発生させる力の定量化や、触覚といった複数のセンサ情報を統合するマルチモーダル化に着手している。これらの基礎技術を発展させることで、将来的には、壊れやすい物体を巧みに扱うソフトロボットグリッパーや、人の動きに自然に寄り添う次世代ウェアラブル機器などへの応用が期待される。
(詳細は、https://www.t.u-tokyo.ac.jp)



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
