








Science/Research 詳細
ロボットプローブは、新材料の重要特性を素早く計測する
October, 2, 2025, Cambridge--科学者たちは、太陽電池やその他の電子機器の効率を高める可能性のある新しい半導体材料の発見に努めている。しかし、イノベーションのペースは、研究者が重要な材料特性を手動で測定できる速度によって制約されている。
MITの研究者が開発した完全自律型ロボットシステムは、作業の効率化に貢献する可能性がある。
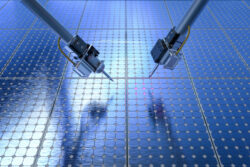
研究チームのシステムは、ロボットプローブを利用して、光コンダクタンスとして知られる重要な電気特性を測定する。光コンダクタンスとは、無物質が光の存在に対してどれだけ電気的に反応するかを示す指標である。
研究チームは、人間の専門家から得た材料科学分野の知識を、ロボットの意思決定を導く機械学習モデルに注入する。これにより、ロボットはプローブと材料に接触するのに最適な場所を特定して、そのフォトコンダクタンスに関する最大限の情報を得ることができ、特殊な計画手順により、接触点間を移動する最速の方法を見つけることができる。
24時間のテスト中、完全に自律的なロボットプローブは、他の人工知能ベースの方法よりも精度と信頼性が高く、1時間あたり125回以上の独自の測定を行った。
この方法は、科学者が新しい半導体材料の重要な特性を特徴付ける速度を劇的に向上させることで、より多くの電力を生成するソーラパネルの開発に拍車をかける可能性がある。
「この論文は非常にエキサイティングだと思う。なぜなら、自律的な接触ベースの特性評価方法への道筋を提供するからだ。材料のすべての重要な特性を非接触で測定できるわけではない。サンプルと接触する必要がある場合は、サンプルを高速にし、得られる情報量を最大化したいと考えている」と、機械工学の教授、自律システムに関する論文の上級著者Tonio Buonassisiはコメントしている。
この研究は、Science Advancesに掲載されている。
コンタクトする
2018年以来、Buonassisiラボの研究者は、完全に自律的な材料発見研究所に向けて取り組んできた。研究チームは最近、ソーラパネルなどの太陽光発電に使用される半導体材料の一種である新しいペロブスカイトの発見に注力している。
以前の研究では、ペロブスカイト材料のユニークな組み合わせを迅速に合成してプリントする技術を開発した。また、いくつかの重要な材料特性を決定するためのイメージングベースの方法も設計した。
しかし、フォトコンダクタンスを最も正確に特徴付けるのは、プローブを材料に置き、光を当て、電気的応答を測定することである。
「実験室をできるだけ迅速かつ正確に稼働させるには、手順全体の実行にかかる時間を最小限に抑えながら、最適な測定値を生成するソリューションを考え出す必要があった」(Siemenn)。
そのためには、機械学習、ロボット工学、材料科学を1つの自律システムに統合する必要があった。
まず、ロボットシステムはオンボードカメラを使用して、ペロブスカイト材料がプリントされたスライドの画像を撮影する。
次に、コンピュータビジョンを使用してその画像をセグメントにカットし、化学者や材料科学者の専門知識を組み込むように特別に設計されたニューラルネットワークモデルに入力する。
「これらのロボットは、われわれの操作の再現性と精度を向上させることができるが、それでも人間がループに参加することが重要だ。これらの化学専門家からの豊富な知識をロボットに実装する良い方法がなければ、新しい材料を発見することはできない」(Siemenn)。
このモデルは、このドメイン知識を使用して、サンプルの形状とその材料組成に基づいて、プローブが接触する最適なポイントを決定する。これらの接触点は、プローブがすべてのポイントに到達するための最も効率的な方法を見つけるパスプランナーに供給される。
プリントされたサンプルは円形の液滴からジェリービーンズのような構造まで、独特の形状をしているため、この機械学習アプローチの適応性は特に重要である。
「それは雪の結晶を測定するのとほとんど同じだ。同じものを2つ入手するのは困難である」(Buonassisi)。
パスプランナーが最短経路を見つけると、ロボットのモーターに信号を送信し、モーターはプローブを操作し、各接触点で連続して測定を行う。
このアプローチの速度の鍵は、ニューラルネットワークモデルの自己教師あり(self-supervised)性質。このモデルは、ラベル付けされたトレーニングデータを必要とせずに、サンプル画像上で最適な接触点を直接決定する。
研究チームはまた、経路計画手順を強化することでシステムを加速した。チームは、アルゴリズムに少量のノイズ、つまりランダム性を追加すると、最短経路を見つけるのに役立つことを発見した。
「この自律型ラボの時代が進むにつれて、迅速にイノベーションを起こすには、ハードウェア構築、ソフトウェア、材料科学の理解という3つの専門知識すべてが同じチームに集まることが本当に必要になる。また、それがここでの秘密のソースの一部である」(Buonassisi)。
豊富なデータ、迅速な結果
システムをゼロから構築した後、研究チームは各コンポーネントをテストした。その結果、ニューラルネットワークモデルは、他の7つのAIベースの手法よりも短い計算時間でより良い接点を見つけたことが示された。さらに、経路計画アルゴリズムは、常に他の方法よりも短い経路計画を発見した。
すべての部品を組み合わせて24時間の完全自律実験を行うと、ロボットシステムは3,000を超える速度で125を超える独自のフォトコンダクタンス測定を実施した。
さらに、この正確な測定アプローチによって提供される詳細レベルにより、研究者はフォトコンダクタンスの高いホットスポットと材料の劣化領域を特定することができた。
「人間の指導を必要とせずに、これほど高速で取得できる豊富なデータを収集できることで、特にソーラーパネルなどの持続可能性アプリケーション向けに、新しい高性能半導体の発見と開発への扉が開かれ始める」(Siemenn)。
研究チームは、材料発見のための完全に自律的なラボの構築に努めながら、このロボットシステムを構築し続けたいと考えている。



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
