








Science/Research 詳細
AIが自律的水中「グライダー」を形作る
August, 21, 2025, Cambridge--CSAILの研究者によって開発されたAIパイプラインは、水中を滑るように動くボディボードサイズビークルの独自の流体力学的設計を可能にし、科学者の海洋データ収集に役立つ。
海洋科学者は、魚やアザラシなどの動物が形が異なるにもかかわらず、いかに効率的に泳ぐかに長い間驚嘆の目を向けてきた。それらの体は、効率的な流体力学的な水中航行に最適化されているため、長距離を移動する際に最小限のエネルギーを発揮できる。
自動運転ビークルも同様の方法で海を漂流し、広大な水中環境に関するデータを収集できる。しかし、これらの漂流機の形状は、海洋生物に見られるものほど多様ではなく、流体力学的でもあるため、定番のデザインはチューブや魚雷に似ていることが多い。さらに、新しいビルド(型)をテストするには、多くの現実世界での試行錯誤を必要とする。
マサチューセッツ工科大学(MIT)のコンピュータサイエンス・人工知能研究所(CSAIL)とウィスコンシン大学マディソン校(University of Wisconsin at Madison)の研究者らは、AIが未知のグライダー設計をより便利に探索するのに役立つ可能性があると提案している。研究チームの方法は、機械学習を使用して物理シミュレータで多様な 3D 設計をテストし、それらをより流体力学的な形状に成形する。得られたモデルは、手作りのモデルよりも大幅に少ないエネルギーで 3Dプリンタにより製造できる。
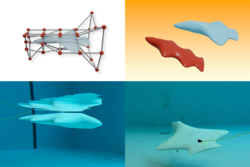
MITの科学者らは、この設計パイプラインにより、海洋学者が水温と塩分レベルを測定し、海流に関するより詳細な洞察を収集し、気候変動の影響を監視するのに役立つ、より効率的な新しいマシーンを作成できると語っている。研究チームは、飛行機に似た2翼のマシーンと、4つのヒレを持つ扁平魚に似たユニークな4翼の物体という、ブギーボードとほぼ同じ大きさの2つのグライダーを製造することで、この可能性を実証した。
MIT CSAILのポスドク、このプロジェクトの共同主任研究員であるPeter Yichen Chenによると、これらのデザインは、同氏のチームのアプローチが生み出すことができる新しい形状のほんの一部である。「われわれは、人間が設計するのに非常に負担がかかる型破りな設計をテストするのに役立つ半自動化プロセスを開発した。このレベルの形状の多様性はこれまで調査されていなかったため、これらの設計のほとんどは現実世界でテストされていない」(Peter Yichen Chen)。
しかし、そもそもAIはどのようにしてこれらのアイデアを思いついたのか?まず、研究チームは、潜水艦、クジラ、マンタ、サメなど、従来の海洋探査の形状 20 を超える 3D モデルを発見した。次に、これらのモデルを「変形ケージ」に閉じ込め、研究チームが引っ張って新しい形状を作成する様々な関節点をマッピングした。
CSAILが率いるチームは、従来の形状と変形した形状のデータセットを構築し、その後、様々な「迎え角」(船舶が水中を滑走するときに傾く方向)でどのように機能するかをシミュレートした。たとえば、スイマーはプールからアイテムを回収するために -30 度の角度でダイビングしたい場合がある。
これらの多様な形状と迎え角は、グライダーの形状が特定の角度でどれだけ効率的に機能するかを基本的に予測し、必要に応じて最適化するニューラル ネットワークの入力として使用された。
滑空ロボットにリフトを与える
チームのニューラルネットワークは、特定のグライダーが水中物理学にどのように反応するかをシミュレートし、グライダーがどのように前進するか、またグライダーに抵抗する力を捉えることを目的としている。目標は、グライダーがどれだけ保持されているかと比較して、グライダーがどれだけ保持されているかを表す、最適な揚力対抗力比を見つけることである。比率が高いほど、ビークルの走行効率が高くなる。低いほど、グライダーは航海中に速度を落とす。
揚抗比は飛行機の鍵である: 離陸時には揚力を最大化して風流に逆らってうまく滑空できるようにし、着陸時には完全に停止するまで引きずるのに十分な力が必要になる。
MIT建築学大学院生でCSAILの提携者であるNiklas Hagemannは、この比率は、海洋で同様の滑空運動が必要な場合にも同様に有用であると指摘している。
「われわれのパイプラインはグライダーの形状を変更して最適な揚力対抗力比を見つけ、水中でのパフォーマンスを最適化する」と、6月に開催されたロボット工学と自動化に関する国際会議で発表された論文の共同筆頭著者でもあるHagemannは語っている。「その後、最高のパフォーマンスを発揮する設計をエクスポートして、3D プリントできる。」
素早いグライディング
研究チームの AI パイプラインは現実的であるように見えたが、チームは、よりリアルな環境で実験することで、グライダーの性能に関する予測の正確さを確認する必要があった。
チームは最初に、紙飛行機に似た縮小ビークルとして 2 翼のデザインを製造した。このグライダーは、風の流れをシミュレートするファンを備えた屋内スペースである MIT のライト ブラザーズ風洞に運ばれた。異なる角度で配置した場合、グライダーの予測揚抗比は、風の実験で記録されたものよりも平均してわずか約5%高く、シミュレーションと現実のわずかな違だった。
視覚的でより複雑な物理シミュレータを含むデジタル評価も、AI パイプラインがグライダーがどのように動くかについてかなり正確な予測を行ったという考えを裏付けた。これらのマシーンがどのように降下するかを 3D で視覚化した。
ただし、これらのグライダーを現実世界で真に評価するには、チームはデバイスが水中でどのように機能するかを確認する必要があった。チームは、このテストのために、特定の攻撃点で最高のパフォーマンスを発揮する2つのデザインをプリントした:9度のジェットのような装置と30度の4翼ビークルである。
どちらの形状も、完全に水没すると浸水する小さな穴のある中空のシェルとして 3D プリンタで製造された。この軽量設計により、車両は水中での取り扱いが容易になり、製造に必要な材料が少なくなる。研究チームは、グライダーの浮力を変化させるポンプ、マスシフター(機械の迎角を制御する装置)、電子部品など、様々なハードウェアを収容するこれらのシェルカバーの内側にチューブのような装置を配置した。
それぞれのデザインは、プールの上をより効率的に移動することで、手作りの魚雷型グライダーよりも優れた性能を発揮した。どちらの AI 駆動のマシーンも、海洋動物が海を楽に航行する方法と同様に、同等のマシーンよりも揚力対抗力比が高いため、消費するエネルギーが少なくなる。
このプロジェクトはグライダー設計にとって心強い前進であると同時に、研究チームはシミュレーションと現実世界のパフォーマンスの間のギャップを縮めようとしている。チームはまた、海流の急激な変化に反応できるマシーンを開発し、グライダーを海や海により適応できるようにしたいと考えている。
Chenは、チームは新しいタイプの形状、特により薄いグライダーのデザインを模索しようとしていると付け加えた。研究チームは、フレームワークをより高速化する考えであり、おそらくより多くのカスタマイズ、操作性、さらには小型車両の作成を可能にする新機能でフレームワークを強化することを考えている。



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
