








Science/Research 詳細
筋骨格ロボットの筋肉冗長性を十分に活用する制御手法を開発
June, 20, 2024, 仙台--東北大学の研究者は、筋骨格ロボットの筋肉であるアクチュエータの冗長性を活用するために、関節が外力に対して元に戻ろうとする剛性の調節やアクチュエータの故障への適応を自律的に実現する制御手法を開発した。
動物の動作は複数の筋肉が協力して作用することで実現されており、運動学などの分野ではこれを冗長性と言う。一部の筋肉が損傷した場合でも他の筋肉がその機能を補い、目的の動作が実現できることがあるが、これには冗長性が一役買っている。こういった動物の生体構造から着想を得た、冗長な筋肉(アクチュエータ)構成を持つ筋骨格ロボットは、可変関節剛性や筋肉の故障に対する強靭性といった利点を持つ。一方、その複雑な構造は制御を困難なものとし、制御解が無数にあり得るため、既存手法では筋肉が破損した場合に手動の再適応学習が必要であるなど、ロボットの冗長性の利点を十分に活用できていなかった。
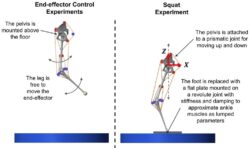
東北大学大学院工学研究科の杉山拓大学院生と林部充宏教授は、英国ケンブリッジ大学のElijah Almanzor大学院生、Arsen Abdulali博士、Fumiya Iida教授らと共同で、冗長性の利点を最大限活用するためのモデルフリーの逆静力学コントローラを提案した。筋骨格脚ロボットシミュレーションを用いた実験で、提案手法はロボットの重量変化や筋肉の故障、地面との接触などに対して再学習などの介入を一切せず自律的に適応し、妥当な制御精度を維持することに成功した。
研究成果は、科学誌Bioinspiration & Biomimeticsに2024年6月10日付けで掲載された。
(詳細は、https://www.tohoku.ac.jp)



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
