






 レーザ・光関連製品Webガイド レーザ、オプトエレクトロニクスの最新製品をご紹介します。
レーザ・光関連製品Webガイド レーザ、オプトエレクトロニクスの最新製品をご紹介します。

Science/Research 詳細
バッテリフリーロボット、オリガミを使って空中で変形
September, 27, 2023, Washington--ワシントン大学の研究者は、降下中に折りたたまれた状態に「スナップ」することで、空中を移動する方法を変更できる小型ロボットデバイスを開発した。
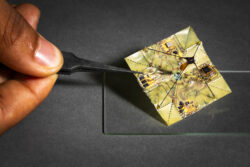
これらの「マイクロフライヤ」がドローンから落とされると、Miura-ori折紙の折り目を使用して、空中を宙返りして外側に分散することから、地面にまっすぐに落下することに切り替わる。フライヤを広げるために、研究者は、搭載圧力センサ(高度推定)、搭載タイマー、またはBluetooth信号など、いくつかの方法を使用して各デバイスの移行タイミングを制御する。
マイクロフライヤの重さは約400ミリグラム(釘の約半分)で、そよ風の中で40m(約131フィート)から落とすとサッカー場の距離を移動できる。各デバイスには、バッテリ不要のアクチュエータ、ソーラ発電回路、およびコントローラが搭載されており、空中でこれらの形状変化を引き起こす。マイクロフライヤには、滑空しながら温度、湿度、その他の条件を調査するためのセンサを搭載できる。
チームはこれらの結果をScience Roboticsに発表した。
「折り紙を使うことで、マイクロフライヤの新しいデザインスペースが開かれる」と、共同シニア著者、Paul G. Allen School of Computer Science & Engineering、UW助教授、Vikram Iyerは話している。「葉に見られる幾何学パタンからヒントを得たMiura-ori折り目と、パワーハーベスティングと小さなアクチュエータを組み合わせて、フライヤが空中で様々な種類の葉の飛行を模倣できるようにしている。展開された平らな状態では、われわれの折り紙の構造は、ニレの葉のように風に無秩序に落下する。しかし、折りたたんだ状態に切り替えると、カエデの葉が落ちるのと同じように、周囲の気流が変化し、安定した降下が可能になる。このエネルギー効率の高い方法により、以前は不可能だったマイクロフライヤ降下をバッテリなしで制御できる」(Vikram Iyer)。
これらのロボットシステムは、いくつかの設計上の課題を克服している。デバイス:
・信号の前に誤って折り畳まれた状態に移行しないように十分に硬い。
・状態間の迅速な移行。デバイスのオンボードアクチュエータは、折り畳みを開始するのに約25msしか必要としない。
・電源に繋がれずに形状を変更する。マイクロフライヤのパワーハーベスティング(発電)回路は、太陽光を使用してアクチュエータにエネルギーを供給する。
現在のマイクロフライヤは、タンブリング状態から落下状態への一方向にしか移行できない。この切替えにより、研究者は複数のマイクロフライヤの降下を同時に制御できるため、降下途中で様々な方向に分散する。
研究チームによると、将来のデバイスは両方向に移行できるようになる。この追加機能により、乱気流の状態でより正確な着陸が可能になる。



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
