








Science/Research 詳細
標高9000m相当の低大気密度を模擬した環境下で羽ばたき翼型飛行ロボット(ロボハチドリ信州)のリフトオフに成功
June, 20, 2023, 仙台--信州大学、東北大学他の研究グループは、東北大学流体科学研究所所有の火星大気風洞の減圧チャンバーを用いて高高度飛行を模擬した低密度環境を構築し、その環境下においてハチドリ規範型羽ばたき翼型飛行ロボット(ロボハチドリ信州)の翼が発生する空気力と翼面形状の同時計測を行った。
昆虫・鳥・コウモリなどの飛翔生物は、巧みな翼の羽ばたき運動と時には胴体や尾翼の動きを利用し優れた飛行を行う。なかでも、翼面上に形成される前縁渦が地上の飛翔生物の自重を支える空気力発生の共通メカニズムとして理解されている。地上より空気密度の低くなる高度数千メートル以上の標高の高い場所に生息する飛翔生物は、飛行の際、自重を支えるために地上より大きな空気力が必要になると言える。しかし、この揚力の補償メカニズムを含む高高度での生物飛翔のメカニズムの詳細は現在も明らかになっていない。
さらに、これまで生物を規範とした様々なタイプの羽ばたき翼型飛行ロボットが開発されてきた。しかし、地上での飛行に注力されており、空気密度の低下に伴う揚力低下が起こる過酷な環境下の高高度での羽ばたき翼型飛行ロボットの開発は行われていなかった。空気中(海面)や水中と比べて流体の密度が低い状態での実験は難しく、高高度飛行を理解するために不可欠な密度の低い中で飛行する生物とロボットの動きを精度良く観察することができなかった。
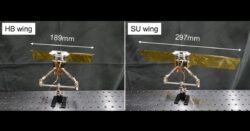
計測により、飛行ロボットの翼の面積を地上のモデルに比べて大きくしゆっくり羽ばたくことにより、大きな羽ばたき振幅と飛翔生物の翼の回転角変化に近い受動的な回転角変化を得られることを示した。この結果、大気密度が地上と比べて約3分の1の低大気密度環境下においても地上での空気力発生機構による大きな揚力の発生を実現させ、羽ばたき翼型飛行ロボットの世界初のリフトオフ実験に成功した。
この結果は、羽ばたき翼特有の空気力学的メカニズムの活用による低密度・高高度環境下での飛行の実現可能性を示すものとなり、生物の高高度飛行メカニズムの理解と更に低密度となる火星大気環境などでの羽ばたき翼型飛行ロボットの飛行実現に繋がる重要な研究成果と言える。
研究成果は6月2日付(イギリス現地時間)でScientific Reports電子版に掲載された。
(詳細は、http://www.tohoku.ac.jp)
研究グループ
信州大学繊維学部の青野光 准教授、東北大学大学院工学研究科の浅井圭介 名誉教授、野々村拓 准教授、小澤雄太 特任助教(現 青山学院大学理工学部 機械創造工学科 助教)、九州大学大学院総合理工学研究院の安養寺正之 准教授(現 株式会社DigitalBlast所属)、前橋工科大学工学部の安藤規泰 准教授、米国アラバマ大学ハンツビル校のKang准教授他



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
