








Science/Research 詳細
一度つかむだけで物体を特定するロボットハンド
April, 26, 2023, Cambridge--三本指のロボットグリッパーは、先端だけではなく、各指の全長に沿って大きな感度で“感じる”ことができる。
人の指からヒントを得てMIT研究者は、高分解能触覚センシングを利用するロボットハンドを開発した、これにより一度つかむと物体を正確に特定できる。
多くのロボットハンドは、指の先端に全ての強力なセンサを詰め込んでいるので、物体が特定されるには、その指の先端が完全に接触していなければならない。他の設計は、指全体に沿って広がる低分解能センサを利用するが、これらは十分な細部を捉えることはないので、何度もつかみ直すことが必要になる。
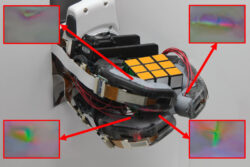
代わりにMITのチームは、ソフトな外層に覆われた剛性骨格のロボットハンドを構築した。その透明“skin.”の下には、多数の高分解能センサが組み込まれている。センサは、カメラとLEDsを使って物体の形状についての視覚情報を収集するものであり、指の全長に沿って連続的にセンシングできる。各指は、物体の多くの部分について、同時に十分なデータを獲得する。
この設計を使用して研究チームは、三本指のロボットハンドを構築した。これは、一度つかむだけで約85%の精度で物体を特定できる。剛性骨格は、ドリルなど、重いものを取り上げるだけの強度がある。一方、ソフトスキンにより指は空のプラスチック水筒など柔軟なものを潰すことなく安全につかむことができる。
これらソフト-剛性の指は、特に高齢者と接触するように設計されている在宅介護ロボットで有用になり得る。そのようなロボットは、人が風呂に入る際に支援するために使う同じ手で、棚から重いものを取り上げることができる。
「ソフト要素と剛性要素の両方をもつことは、どんな手でも非常に重要であるが、実に大きな領域でセンシング能力を発揮できる。特に、われわれの手がするのことと同じような極めて複雑な操作作業をしたい場合である。この研究のわれわれの目標は、われわれの手がする全てのことをロボットの指に組み込むことだった。これは、現状、他のロボットの指ができないことである」と機械工学、院生、Sandra Liuは、説明している。同氏は、ロボットフィンガーについての研究論文の共著者である。
人からヒントを得た指
ロボットの指は、3Dプリントされた固い内骨格で構成されている。これは、型にはめられ、透明なシリコーン“skin.”に包まれている。指を型で作ると、シリコーンを固定するためのファスナー、あるいは接着剤の必要性がなくなる。
研究チームは、ロボットの指が静止しているときに、人の指と同様、わずかに湾曲するように、湾曲形状の型を設計した。
「シリコーンは、曲がると皺ができるので、指をこの湾曲した位置で型にはめると、それはもっと曲げてモノをつかむ際、それほど多くの皺はできない、と考えた。皺はある意味で適切である。皺は、指が表面に沿って非常に滑らかに、簡単にスライドするのに役立つ。しかし制御できないほどの皺は不要である」(Liu)。
各指の内骨格は、一対の詳細な触覚センサ、GelSightセンサとしてられるセンサをもっている、これらは上部と中部セクション、透明スキンの下に埋め込まれている。センサは、カメラの範囲がわずかにオーバーラップするように配置されており、指が全長に沿って連続センシングできるようになっている。
Adelsonグループで開発された技術をベースにしたGelSightセンサは、カメラと3つのカラーLEDsで構成されている。指がモノをつかむと、カメラが画像を捉える、色LEDsは内部から皮膚を照射する。
ソフトスキンに現れる照射されたリンクを利用することで、アルゴリズムが逆算し、つかんだモノの表面の輪郭マップを作る。研究チームは、マシンラーニングモデルを訓練し、生のカメラ画像データを使用して物体を特定できるようにした。
指の製造プロセスを微調整すると、チームはいくつかの障害に直面した。
まず、シリコーンは、時間経過と共に表面から剥がれる傾向がある。チームは、内骨格の関節間のヒンジに沿って小さなカープを加えることでこの剥離を制限することができた。
指が曲がると、シリコーンの曲げが微小なカーブに沿って分布し、これが応力を減らし、剥離を防ぐ。
その設計のトラブルシューティングをしている間にチームは、シリコーンの皺がスキンが裂けるのを防ぐことに気づいた。
「皺の有用性は、われわれの予想外の発見だった。皺を表面に統合したとき、実際、それが予想以上に指の耐久性を強化することを確認した」と同氏は話している。
うまくつかむこと
設計を完了するとチームは、Yパタンに配列された2つの指、対向する第三の親指を使いロボットハンドを構築した。そのハンドが物体をつかみ(各指の2本)、そのイメージをマシンラーニングアルゴリズムに送り、それらを物体を特定るインプットとして利用するとき、そのハンドは6つのイメージを捉えている。
ハンドは、その指の全体をカバーする触覚感覚を持つので、1回つかむと豊富な触覚データを収集できる。
「指には多くの感覚があるが、掌に感覚を追加すると、恐らく感覚の違いのさらなる向上に役立つ」(Liu)。
将来的には、チームは、ハードウエアを改善して、時間経過にともなう消耗量を減らし、親指に作動を増やすことで、タスクの幅を広げたいと考えている。



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
