








Science/Research 詳細
ソフトロボットハンドの「つかむ、放す、つかみ損ねる」をセンシング
December, 2, 2022, つくば--産業技術総合研究所(産総研)ナノ材料研究部門 杉野卓司 研究グループ長、物部浩達 主任研究員、堀内哲也 主任研究員は、立命館大学理工学部ロボティクス学科 平井慎一 教授、松野孝博 助教らと共同で、イオン導電性高分子センサをソフトロボットハンドの屈曲センサとして用いると、ソフトロボットハンドが物をつかむ際の指を曲げ伸ばす「動き」と指の屈曲度合いの「形状」の両方が検出でき、さらに、つかんだ物を落としたことも判断できることを見いだした。
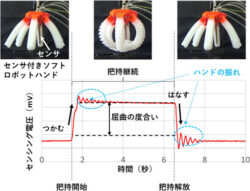
従来の圧電式フレキシブルセンサは、ソフトロボットハンドの指を曲げ伸ばして物をつかんだり離したりする「動き」しか検出できず、物をつかんで静止した後、どの程度指が屈曲しているかという「形状」を定量的に検出するのは困難だった。これに対し、イオン導電性高分子センサは、指の「動き」だけでなく、静止後の指の「形状」もあわせて検出することが可能。そのため、ソフトロボットハンドがつかんだ物の大きさや、正しくつかみ続けられているかの情報を得ることができる。さらに、つかんだ物を落とした際に起こるハンドの微細な振動も検出して解析することで落下を判断できるようになった。
人件費の上昇や人手不足の解消のため、例えば食品業界では、食品パッキング作業の省力化が求められている。ソフトロボットハンドによる物をつかむ作業の自動化では、つかむ作業の成否の判断が課題となっていた。今回、イオン導電性高分子センサの特性を使って、この課題が解決した。
この技術の詳細は、2023年2月1日~3日に東京ビッグサイトで開催される「nano tech 2023」にオンライン展示(2022年12月1日~2023年2月28日)される。
(詳細は、https://www.aist.go.jp)



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
