








Science/Research 詳細
人間とロボットのチームで仕事を分けるアルゴリズム
June, 2, 2022, Pittsburgh--カーネギーメロン大学(Carnegie Mellon University)ロボット工学研究所(RI)の研究者は、人とロボットへの仕事依託に役立つアルゴリズムプラナーを開発した。
プラナー, “Act, Delegate or Learn” (ADL)は、タスクリストを考慮し、それらをどのように割り当てるのが最適であるかを決定する。研究者は、3つの問いを出した。タスクを完成するためにロボットは何時行動すべきか。タスクは、何時人に依託すべきか。さらに、ロボットは、新しいタスクを何時学習すべきか。
「決定に関わるコストがある。人がタスクを完了するのかかる時間、タスクを完了するためにロボットに教えるためにかかる時間、ロボットがタスクを失敗する際のコストなど」とRIのPh.D学生、主任研究者Shivam Vatsは、説明している。「その全てを考慮すると、われわれのシステムは、最適の分業を提供する」。
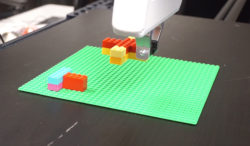
チームの研究は、製造および組立工場で役立つ。パッケージの仕分け、あるいは人とロボットが複数のタスクを完成するために協働するような環境で役立つ。研究チームは、人とロボットがブロックをペグボードに挿入し、ロゴブリックでできた様々な形状およびサイズのパーツをスタックするシナリオでプラナーをテストした。
アルゴリズムとソフトウエアを使い、労働を附与、分業する仕方を決めることは、ロボットがチーの一部となっている場合でさえ、新しくない。しかし、この研究は、その推論で学習するロボットを組み込んだ最初である。
「ロボットは、もはや静的ではない。改善でき、教え込むことができる」(Vats)。
多くの場合、製造では、人が手動でロボットアームを操作して、タスクの完了の仕方を教えることがある。ロボットに教えることは時間がかかる、したがって、前払いコストが高くなる。しかし、もしロボットが新しい技能を学習することができれは、最終的には有益である。複雑さの一部は、人にタスクを依託する場合に対して、ロボットに何時教えるのがベストであるかを決めることである。これが必要とするのは、新しいタスクを学んだ後、ロボットが、いかなる他のタスクを完了できるかの予測である。
この情報を前提にすると、プラナーは問題を混合整数計画法に変換する、スケジューリング、製造計画あるいは通信ネットワークの設計で一般に利用されている最適化プログラムである。それは、既製のソフトウエアで効率的に解決できる。プラナーは、あらゆる場合で従来のモデルよりもパフォーマンスが優れていた。また、タスクを完了するコストは、10%から15%少なくなった。
(詳細は、https://www.cs.cmu.edu)



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
