








Science/Research 詳細
NICT、ロボット活躍社会を支えるIoT無線利活用技術
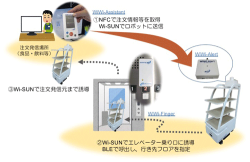
October, 21, 2020, 東京--情報通信研究機構(NICT)ソーシャルICTシステム研究室は、免許不要IoT無線通信規格Wi-SUNと近距離無線通信技術BLE等を組み合わせて活用することで、自律移動型ロボットやスマートフォンを携帯した人が、非接触で簡単にエレベータを自ら呼び出し、搭乗、行き先フロアを指定して、異なるフロア間を移動できる、エレベータ移動支援システムを開発した。
既設エレベーターの制御システムに改修を行うことなく、エレベータ内外の呼出しボタンまたは行き先指定ボタンに小型のIoTボタン押下デバイスを設置するだけの簡単・迅速・低コストな仕組みで実現した。
開発したエレベータ移動支援の仕組
小型IoTボタン押下デバイス(WiWi-Finger)は、BLEによる通信機能、及びモータによるボタン押下機構を備える小型デバイスで、エレベータ外の呼出しボタン、及びエレベータ内の行き先フロアボタンに被せるように設置して利用する。
WiWi-Fingerは、ロボット側のBLE通信モジュールからボタン押下コマンドを受信すると、ボタン押下機構により物理的にボタンを押下し、一定時間経過後に自動的にボタンを離す。ロボット側のBLE通信モジュールは、BLEペアリングと呼ぶ1対1通信のコネクションを特定のWiWi-Fingerとのみ確立するため、複数の行き先フロアボタンに、それぞれ異なるWiWi-Fingerを設置しても、行き先フロアに対応したWiWi-Fingerだけをボタン押下することができる。
このロボットは、縦539 mm、横460 mm、高さ1088 mmの自律移動型ロボットで、LiDARセンサを使って、常に周辺の障害物等との距離を計測し、障害物を回避しながら自律的に移動することができる。自己位置推定と環境地図作成を同時に行う技術(SLAM: Simultaneous Localization and Mapping)を採用した地図自動作成機能を備えており、リアルタイムに自らの周辺環境の変化も捉えた地図を更新しながら現在地を推定し、与えられた目的地点に向かうことができる。
実証実験では、このロボットに、Wi-SUN通信モジュールとBLE通信モジュールを新たに追加搭載した。Wi-SUN通信モジュールは、比較的遠方(~数百メートル)からのナビゲーション情報やリクエスト情報を受信し、そこからWiWi-Fingerと通信可能なエリア(周辺数メートル内)の情報を抽出して、この情報に基づき、ロボットをエレベータまで誘導する。ロボットがエレベータ前に到着すると、BLE通信モジュールを使って、WiWi-Fingerにエレベータボタンの押下を指示し、エレベータボタンの操作が非接触で可能となる仕組みとなっている。
(詳細は、https://www.nict.go.jp)



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
