








Science/Research 詳細
ブラインドスポットなしの触覚ロボットフィンガー
September, 3, 2020, New York--コロンビア大学工学部の研究者は、触覚を持つ新しいタイプのロボットフィンガーを作製した。そのフィンガーは、広い、多重曲面に、人の指と全く同じように、非常に高精度、<1mm、で接触場所を見つけ出すことができる。
「単独の触覚センサと完全統合触覚フィンガーの間に以前からギャップがあった。触覚センサは、ロボットセンサではユビキタスには程遠い」と機械工学、コンピュータサイエンス准教授、Matei Ciocarlieは言う。「論文では、複雑な3D面で正確な触覚局在化と垂直抗力検出を持つ多重面ロボットフィンガーを実証した」。
触覚センサを構築する現在の方法は、ロボットフィンガーへの組込が困難であることを証明している。課題は多くあり、多重面をカバーすることが困難、ワイヤ数が多いこと、小さな指先端へ収めることが難しいなど。したがって、器用な手には使えない。コロンビア工学チームは、新しいアプローチを採用した。指の機能面をカバーする透明導波路層に内蔵した光エミッタとレシーバからのオーバーラップ信号を利用することである。
全ての送信器と受振器との間の光伝送を計測することでチームは、接触による指の変形に反応して変化する非常に豊富な信号データセットを入手できることを示した。次に、純粋なデータ駆動ディープラーニング法が、解析モデルの必要なしで、接触位置、適用した垂直抗力など、データから有用な情報を引き出せることを実証した。最終結果は、完全組み込み、センサ付きロボットフィンガーであり、少ない配線数、利用可能な製法を使って構築し、機敏な手に簡単に集積できるように設計されている。
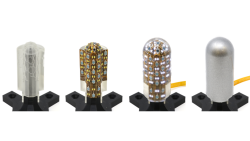
研究成果は、IEEE/ASME Transactions on Mechatronics.オンライン発表された。ここでは、その新しい結果を統合して可能にする下層にある技術の2つの側面を実証している。まず、このプロジェクトでは、研究者は光を使って触覚を検知する。「皮膚」の下で、その指は透明シリコーンでできた層を持ち、それに30個以上のLEDsから光を照射する。フィンガーは、30以上のフォトダイオードを持ち、光の跳ね回り方を計測する。指が何かに触れるときにはいつでも、その皮膚が歪み、したがって、下の透明層で光が変化する。全LEDから光が全ダイオードにどの程度行くかを計測した。接触について何らかの情報をもつ各信号は、最終的に約1000だった。光は、湾曲空間で跳ね回るので、これらの信号は、指先端のような複雑な3D形状をカバーすることができる。
「人の指は、信じらないほど豊富な接触情報をもたらす。皮膚の平方センチメートル当たり400以上の微小タッチセンサである。それをモデルにしてわれわれは、指から可能な限り多くのデータを引き出そうとした。指の全側面で全ての接触がカバーされていることの確認は極めて重要だった、基本的に、われわれはブラインドスポットのない触覚ロボットフィンガを造った」(Ciocarlie)。
2つ目に、チームはこのデータをマシンラーニングアルゴリズムで処理するように設計した。非常に多くの信号があるので、その全てを部分的に、相互に重なるようにすると、データは人が解釈するには複雑すぎる。幸い、現在のマシンラーニング技術は、研究者が大切と考える情報を引き出して学習できる。指がどこに触れているか、指に触れているものは何であるか、どの程度の力が加えられているか、など。
「われわれの結果は、ディープニューラルネットワークは、こうした情報を非常に高精度に引き出せることを示している。われわれのデバイスは、初歩から設計して、AIアルゴリズムと連動して使える真の触覚フィンガーである」(データ化学研究所メンバーKymissis)。
加えて、チームは、その指がロボットの手に組み込めるように構築した。そのシステムを手に組み込むことは簡単である。この新しい技術により、指は、1000程度の信号を収集するが、それを手に接続するために必要な配線数は14本である。また、複雑なオフボードエレクトロニクスは不要である。研究者は、これらの指をラボで適用するために、すでに2本の器用な手を造った(物をつかんだり操作したりできる)。片方は、3本指、他方は4本指。今後、チームはこれらの手を使って、触覚および固有受容性データに基づいて、器用な操作能力を試行し実証する予定である。
「器用なロボット操作は、製造、物流などの分野で、現在必要とされている。長期的には、ヘルスケア、サービス分野など、他の領域で個人的ロボット支援実現に必要になる」とCiocarlieは付け加えている。
(詳細は、https://www.engineering.columbia.edu)



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
