








Science/Research 詳細
幾何学的ねじれがロボット線維のパワーを高める
February, 20, 2026, Lausanne--細い金属糸を柔軟な織物に織り込む方法を再考することで、EPFLの研究者たちは自重の400倍以上を持ち上げられる軽量な生地を作り上げた。この研究は、機械的なかさばりを伴わない身体的支援を提供するウェアラブルの開発を前進させる。
今日のほとんどのウェアラブルロボットシステムは、快適さや社会的受容が限られた剛性の高い部品に依存している。作動時に力を加えるロボット要素は、人間の筋肉に目立たない機械的補助を提供するが、これらのアクチュエータが十分な力と可動域を保ちつつ、衣服に統合できる柔軟性を保つことは非常に困難である。
EPFL工学部のソフトトランスデューサラボ(LMTS)の研究チームは、形状記憶合金(SMA)繊維を周期的なXパターンで交錯させたテキスタイルアクチュエータを開発した。これをXクロッシングジオメトリと呼ぶ。50%収縮すると、XクロスパターンでSMA繊維を統合した4.5グラムの布地は1kgを持ち上げることができる。この研究は、張華鵬とLMTS責任者のHerbert Sheaが主導し、Science Advances誌に掲載された。
協力する繊維による強度と柔軟性
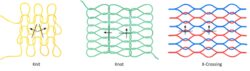
チームの作業原理は、ニッケル・チタン合金製の細いSMAスレッドが電流で加熱されると短くなり剛性が増す仕組みに基づいている。SMAファイバは強力だが、ファイバでの効果は歴史的に交織の仕方によって制限されてきた。標準的なニットやノットでは、ファイバが異なる方向にループ状に絡み合ってる。収縮すると、力同士が引き合い、部分的に打ち消し合うことが多い。
この制約を克服するために、EPFLチームはX-Crossingアーキテクチャを開発した。この設計では、すべてのファイバ交差が望ましい動きの方向に正確に整列される。ファイバ同士が互いに争うのではなく、シームレスに協力し合う。このアライメントにより、発生する力を最大化するだけでなく、得られた生地は元の長さの160%まで伸ばされ、衣服は柔軟で着やすいものになる。
「繊維交差の向きが繊維アクチュエータ内で力の積み重なりに重要な役割を果たすことが分かった。交差点を整列させることで、各交差点で発生する力が互いに逆立するのではなく建設的に寄与するようになり、従来の編み物や結び目デザインを大きく上回るテキスタイルアクチュエータを実現している」とLMTS Ph.D学生で筆頭著者、Huapeng Zhangは説明している。
ウェアラブル補助と圧迫
X-Crossingアクチュエータの実用的な応用可能性を示すため、チームはそれらを2つの機能的なウェアラブルプロトタイプに統合した。まず、テキスタイルをマネキンの腕に取り付けることで、肘を曲げるための着用可能なスリーブを実証した。アクチュエータは、マネキンの手に持った1kgのバッグを滑らかかつ制御された方法で30度の可動域で持ち上げた。2回目のデモンストレーションでは、アクチュエータが医療用スリーブや運動用ギアに必要なオンボディ圧縮に効果的にに使用された。
「テキスタイルは従来パッシブアパレルとしてのみ機能してきたが、強力なアクチュエータとして機能する生地への移行により、日常生活をサポートする快適で目立たず実用的なウェアラブルロボットの新たなクラスが生まれた」(Herbert Shea, head of the EPFL Soft Transducers Lab)。
新しいアーキテクチャ自体に加え、研究チームはSMAファイバが温度や応力によって剛性をどのように変化するかを捉える力学モデルも開発した。従来の簡略化された手法とは異なり、このモデルは相転移を経る各ファイバ内の空間剛性の変化を考慮し、異なる荷重、温度、幾何学的設計下でアクチュエータがどれだけの力と収縮を生み出すかを科学者に予測できるようにする。
Sheaは、X-Crossing設計の大きな利点の一つは効率性であり、圧縮圧力をエネルギーコストゼロで維持できることを強調している。
「テキスタイルは従来パッシブアパレルとしてのみ機能してきたが、強力なアクチュエータとして機能する生地への移行により、日常生活をサポートする快適で目立たず実用的なウェアラブルロボットの新しいクラスが生まれた」と同氏は話している。





![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
