








Science/Research 詳細
ロボットを使い、昆虫の異なる飛行戦略進化を理解
November, 9, 2023, San Diego--UC San Diegoのエンジニアによって構築されたロボットは、昆虫の飛行がどのように進化したかを理解する上で大きなブレイクスルー達成に役立った。 この成果は、Nature誌に説明されている。
この研究は、UC San Diegoロボット工学者とGeorgia Institute of Technology生物物理学者との間の6年間の共同研究の結果である。
この新知見は、昆虫の2つの異なる飛行モードがどのように進化したかに焦点を当てている。ほとんどの昆虫は、われわれが一歩踏み出すたびに足の筋肉を活性化するのと同じように、翅のストロークごとに飛行筋を活性化するために脳を使用する。これは同期飛行と呼ばれている。しかし、蚊などの一部の昆虫は、神経系が各翅ストロークを指揮することなく羽ばたくことができる。代わりに、これらの動物の筋肉は、引き伸ばされると自動的に活性化する。これは非同期飛行と呼ばれる。非同期飛行は、4つの主要な昆虫グループの昆虫では一般的となっているものがあり、例えば、蚊の中には毎秒800回以上翅を羽ばたかせることができるものもある。
何年もの間、科学者たちは、ミツバチ、ハエ、カブトムシ、真の虫(半翅目)の4グループの昆虫が、すべて別々に非同期飛行を進化させたと仮定していた。しかし、Georgia Techのチームが行った新しい分析では、非同期飛行は実際には1つの共通祖先で一緒に進化したと結論付けている。その後、昆虫種のグループの中には同期飛行に戻ったものもあったが、他のグループは非同期のままとなっていた。
蛾などの一部の昆虫が同期飛行から非同期飛行に進化し、その後同期飛行に戻ったという発見により、研究チームは昆虫、ロボット、および数学実験を必要とする調査の道をたどった。この新しい進化的発見は、2つの基本的な疑問を提起した:蛾の筋肉は以前の非同期性の痕跡を示すのか、また昆虫は筋肉の同期特性と非同期特性の両方をどのように維持し、それでもなお飛行できるのか。
同期進化と非同期進化のこれらの問題を研究するための理想的なサンプルはホークモス(Hawkmoth)である。これは、蛾が同期飛行を利用する理由めであるが、進化の記録によると、非同期飛行の祖先が存在する。
Georgia Techの研究チームは、最初にホークモス(スズメガ)の筋肉に非同期の痕跡が観察されるかどうかを測定しようとした。筋肉の機械的特徴付けを通じて、チームは、使用されていなくても、非同期飛行筋の物理的特性をホークモスが保持していることを発見した。
昆虫はどのようにして同期と非同期の両方の特性を持ち、それでも飛ぶことができるか。
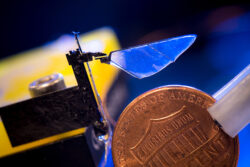
この問いに答えるために、研究チームはロボットを使うことで昆虫では決してできない実験を行うことができることに気づいた。たとえば、非同期筋と同期筋の組み合わせをエミュレートできるモータをロボットに装備し、何100万年もの飛行の進化の間にどのような移行が発生したかをテストできる。
この研究は、ロボット物理学の可能性、つまりロボットを使用して生命システムの物理学を研究する実践にスポットを当てていると、Nick Gravishは話している。同氏は、UC San DiegoJacobs School of Engineering機械&航空宇宙工学教授、論文のシニア著者の1人である
「非同期飛行と同期飛行の間の移行がどのように発生するかについての理解を示すことができた。羽ばたきウイングロボットを作ることで、生物学における進化論的疑問への答を提供する手助けをした」(Gravish)。
基本的に、動物や他のものが環境内をどのように移動するかを理解しようとしている場合、これらのものと同様の機能を持ち、同じ環境を移動するロボットを構築する方が簡単な場合がある、とGravishの研究室でPh.Dを取得し、論文の筆頭共著者の1人であるJames Lynchはコメントしている。
「ここでの最大の進化的発見の1つは、これらの移行が両方向に発生していること、さらに非同期筋の複数の独立した起源ではなく、実際には1つしかないということだ。その1つの独立した起源から、同期に戻る複数の見直しが発生した」と、Seton Hill University生物学助教授、共同筆頭著者の1人、であるBrett Aielloはコメントしている。同氏はGeorgia Tech、Simon Sponberg教授の研究室でポスドク研究員だったときにその研究のために仕事をしていた。
成果、課題、次のステップ
ロボットとモデリングの実験は、昆虫が同期飛行から非同期飛行に移行する方法を研究チームがテストするのに役立った。たとえば、チームは、同期飛行と非同期飛行を組み合わせて、実際に飛行できるかどうかを確認できるモータを備えたロボットを作ることができた。チームは、適切な状況下では、昆虫が2つのモード間を徐々にスムーズに移行できることを発見した。
「ロボット実験は、この進化と移行のための可能な経路を提供した」(Gravish)。
Lynch は、ロボットの周囲の流体の流れのモデリングや、昆虫の筋肉が引き伸ばされたときのフィードバック特性のモデリングなど、いくつかの課題に直面した。同氏は、モデルが正確であることを確認しながら、モデルを可能な限り単純化することで、これを解決することができた。複数の実験の後、同氏はボットを安定させるためにボットの動きを遅くする必要があることにも気づいた。
ロボット工学の観点からの次のステップには、材料科学者と協力してフラッパに筋肉のような材料を装備することが含まれる。
この研究は、昆虫の飛翔の進化と生物物理学の解明に役立つだけでなく、ロボット工学にも有益である。非同期モータを搭載したロボットは、突風や翼の衝突時などの環境に迅速に適応して対応できる、とGravishはコメントしている。この研究は、ロボット工学者が羽ばたく翼を備えた、より優れたボットを設計するのにも役立つ。
「この種の研究は、応答性が高く適応性のある羽ばたき翼システムの新時代の到来を告げるのに役立つ可能性がある」(Gravish)。
昆虫の飛行ダイナミクスにおける生物物理学的移行は、一般的な筋肉生理学によって橋渡しされている





![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
