








Science/Research 詳細
人工知能を使ってロボット群を協働させる
September, 15, 2022, Urbana--通信回線がオープンであれば、ロボットやドローンは協働してタスクを完了できる。しかし、適切なハードウエアの装備がなく、あるいは信号がブロックされていると、通信は不可能になる。イリノイ大学アーバナ・シャンペーン校の研究者は、この困難な課題への取組を始めた。研究チームは、一種の人工知能、マルチエージェント強化学習を使ってマルチエージェントが協働するように訓練する方法を開発した。
イリノイ大学航空宇宙工学、Huy Tranは、「エージェントが相互通信できれば簡単なことだが、われわれは、相互に通信しない、非集中的な方法でこれをしたかった。われわれは、エージェントにとって多様な役割、仕事が明らかでない状況にも焦点を当てた」と説明している。
Tranによると、このシナリオは、はるかに複雑で困難な問題である。あるエージェントが、他のエージェントに対して何をするかがはっきりしないからである。
「興味深い問題は、われわれが時間をかけて、どのように共にタスクを成し遂げることができるかだ」(Tran)
研究チームは、マシンラーニングを使って効用関数を作ることでこの問題を解決した。つまり、それはエイジェントに、それが何時チームにとって有用なこと、よいことをしているかを教える。
「チームの目標では、誰が勝利に貢献したかを知るのは難しい。われわれはマシンラーニング技術を開発した。これによりわれわれは個々のエイジェントが全体的なチーム目標に何時貢献したかを特定できる。スポーツに関してそれを見ると、あるサッカープレイヤーか得点するが、われわれはそのゴールを導いた、アシストのような他のチームメートによる行動について知りたい。これらの遅効を知るのは難しい」と同氏は説明している。
研究チームが開発したアルゴリズムはエイジェント、つまりロボットが、目標に寄与しない何かをしているのは何時であるかも特定できる。「ロボットが間違って何かをする選択、つまり最終目標に有益ではない何かをするように選択するのは、大したことではない」。
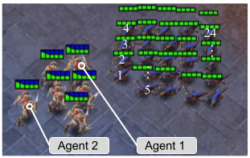
チームは、人気のあるゲーム、Capture the Flag や StarCraftのような模擬ゲームを利用してそのアルゴリズムをテストした。
「StarCraftは、少し予測が難しい。われわれの方法がこの環境でもうまく機能しているのを見て感動した」
Tranによると、Seung Hyun Kimが、機械工学の学生時代にそのアイデアの背後の理論のほとんどに取り組んだ。航空宇宙学生Neale Van Stralenが導入を手助けした。TranとGirish Chowdharyが二人の学生にアドバイスした。研究成果は、AI学界、先頃Autonomous Agents and Multi-Agent Systems査読会議に発表された。論文“Disentangling Successor Features for Coordination in Multi-agent Reinforcement Learning,”は、5月に開催されたInternational Conference on Autonomous Agents and Multiagent Systems の論文集に掲載されている。
(詳細は、https://aerospace.illinois.edu/news/49234)





![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
