








Science/Research 詳細
光学「ノイズ」から隠れた対象物を追跡する方法を開発
May, 19, 2017, Washington--セントラルフロリダ大学(University of Central Florida)の研究チームは、散乱媒体の背後に隠れた対象物を、その動きによって生ずる光「ノイズ」の振動を解析することによつて追跡する新しいソリューションを開発した。
そのアプローチは、軍事や他のアプリケーション向けのリアルタイムリモートセンシングの進化に寄与する。例えば、霧の中を進む車両や航空機の追跡に使える。また、直接には観察できな高速運動の粒子に関わる生物医学研究分野でも有用である。
遠隔の、あるい視覚的に捉えることができない対象物を検出、追跡する技術は多いが、そのほとんどは、LiDARのように対象物とセンサの間に見通し線を必要とする。つまり、対象物が、雲、霧あるいは他の光を散乱する条件で曖昧になっているとうまく機能しない。
セントラルフロリダ大学研究チームのリーダー、Aristide Dogariuは、「対象物をコヒレント光ビームで照射する代わりに、ランダムな、ノイズのような光でそれを照射する。光の振動が対象物との相互作用でどのように変わるかを見ることで、対象物についての情報を取り出すことができる。これはパラダイムシフトだ」と説明している。
既存の追跡技術は、2つのアプローチのうちの1つを利用する。LiDARは、光ビームを対象物に照射し、ビームを動き回らせて対象物のサイズ、形状、軌跡などの情報を引き出す。一方、イメージングベースの方法は、対象物の一連の画像を取得して、計算でその動きを時間経過で追跡する。
しかし、見通し線の何かが散乱し、光がランダムになると、問題が生ずる。
研究チームは、光の振動から情報を推論する方法を10年以上研究している。このコンセプトを材料特性のセンシング、超高解像度顕微鏡向けの新たなツールの開発に適用した。最新の研究では、対象物を見ることができず、それに照射する光の方向性を制御することも正確に示すこともできない条件で、動く対象物を追跡しようとした。
「ある散乱ディフューザの背後に隠れた対象物は、空間的にコヒレントなビームで照射することはできない。対象物の動き、そのサイズと特性は、ノイズのような光場の統計的特性に影響を与え、この影響をわれわれが計測する」とDogariuは説明する。
光は予測可能なふるまいをするので、研究チームは、対象物の動きによって生ずる振動から自然雑音を分離する統計的方法を開発することができた。
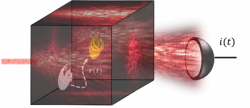
そのアプローチをテストするために、研究チームは、光を散乱するように設計されたプラスチックボックスに小物体を入れた。散乱壁の1つにコヒレント光ビームを照射するとボックス内に二次的光源が生ずる。標的となる対象物はこの光を散乱させ、光が散乱壁を透過して戻ってくるときに光の波はさらにランダム化される。次に光を箱の外の集積ディテクタで収集し、ここで対象物によって生じた振動から自然雑音を区別するアルゴリズムを使用する。
実験では、簡素で多様性のあるセットアップを使って散乱する囲いの中の物体の動きをリアルタイムで正確に追跡することができた。
詳細は、
Paper: M.I. Akhlaghi, A. Dogariu, “Tracking hidden objects using stochastic probing,” Optica, Volume 4, Issue 4, 447-453 (2017).
DOI: 10.1364/optica.4.000447





![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
