






Science/Research 詳細
3D表面測定の速度と精度を向上
November, 1, 2024, Washington--新しい技術により、工業検査、医用画像、ロボットビジョンの精度測定が向上する可能性がある。
中国、電子科技対角の研究チームは、高品質の3D表面測定を取得および再構築するための、より迅速で正確な方法を開発した。 このアプローチにより、工業検査、医療アプリケーション、ロボットビジョンなどに使用される表面測定の速度と精度の大幅向上が可能になる。
「従来の3Dイメージングは、2つの視点を比較することで機能する。これは、われわれの目が協力して奥行きを判断するのと似ている」と、中国電子科学技術大学の研究チームリーダー、Ce Zhuは説明している。「それとは対照的に、われわれの新しいアプローチは、光のパタンを投影することで表面を『感じ』る。まるで手を動かして変化を検出するようなものである。これにより、使用するパタンの数を3分の2以上減らすことができ、スキャンプロセスが大幅に高速化され、驚くべきことに、従来の手法よりもさらに正確になる。」
Optica では、研究者が新しいフリンジ測光ステレオ法について説明し、ノイズの分散を半分にしながら高フレーム レートとマイクロメートル レベルの精度を達成できることを示している。
「われわれのアプローチは、プリント回路基板、バッテリ、石油パイプラインの欠陥検出などの産業アプリケーションや、診断やインプラントのカスタマイズなどの医療処置など、リアルタイムスキャンを必要とするアプリケーションに最適である。また、人間とロボットの相互作用を改善したり、衣服をたたむなどのタスクに対する視覚ガイダンスを提供したりすることで、ロボット工学の進歩にも役立つ可能性がある」(Zhu)。
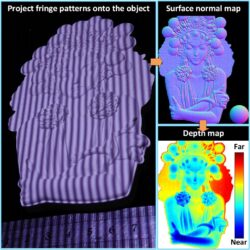
取得時間の高速化
正確な3D表面測定と再構成は、通常、位相シフトプロフィロメトリ(形状測定)として知られるフリンジプロジェクションプロフィロメトリ法を使用して取得される。このアプローチを使用すると、位相シフトした一連の光パタンがオブジェクトの表面に投影される。次に、反射した画像をキャプチャし、位相差を分析して、表面の高精度な3Dマップを作成する。
ただし、この方法は、主に位相差の分析に必要な多数の多周波フリンジ画像に起因してスキャン時間が長いため、多くのアプリケーションには有用でない。このステップでは、三角測量を使用して、特定の範囲に限定された位相データを取得し、それを連続値に変換して、形状または表面を正確に表現できるようにする。新しい研究では、研究チームはこのプロセスを回避し、1つの周波数のみを使用して必要なフリンジ画像の数を大幅に減らす方法を開発した。
新しいフリンジ測光ステレオ技術をテストするために、研究チームは、8mmレンズを備えた1280×960カメラと、解像度912×1140のプロジェクタで構成される実験システムを設定した。このセットアップを使用して、人間の手、紙マスク、布製玩具、石膏の形状、粘土の手工芸品など、単一のオブジェクトと連続した表面を持つオブジェクトのグループを測定した。また、標準的な平面モデルと球体モデルを使用してこのアプローチを検証し、従来のフリンジプロジェクションプロフィロメトリと比較してノイズを効果的に抑制できることを実証した。
より優れた義肢の創造
「この新しい方法が特に役立つ可能性のあるアプリケーションの 1 つは、補綴物のカスタマイズだ。残肢から高精度の表面情報を迅速に取得できるため、手動測定に関連するエラーが減り、義肢のフィット感が向上する。これにより、皮膚に絆創膏やその他の材料を塗布する必要もなくなり、患者にとってはるかに快適な体験ができるようになる」(Zhu)。
この方法は現在、連続した表面を持つシーンのスキャン速度と精度を向上させているが、突然の深さの変化でオブジェクトの深さを再構築することは依然として難しい。研究チームは、フォトメトリックステレオからの確立された表面再構成技術をその方法に組み込むことにより、この制限に対処するために取り組んでいる。これにより、より複雑なシーンの幅広い有望なアプリケーションと分析が可能になる。


![]()
関連雑誌:Vision Systems DESIGN, Vision Systems DESIGN China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.