






 画像処理製品WEBガイド 画像処理、マシンビジョンシステムの最新製品をご紹介します。
画像処理製品WEBガイド 画像処理、マシンビジョンシステムの最新製品をご紹介します。Science/Research 詳細
360°HUD視界、リアルタイムで路上障害を警告
February, 8, 2024, Cambridge--ケンブリッジ大学の研究チームは、潜在的な危険を高解像度の3次元ホログラムとしてドライバーの視界にリアルタイムで直接表示することで、交通安全を向上させることができる拡張現実ヘッドアップディスプレイ(HUD)を開発した。
現在のHUDシステムは、車両のフロントガラスに2次元で投影するシステムしかないが、ケンブリッジ大学、オックスフォード大学、ユニバーシティ・カレッジ・ロンドン(UCL)の研究者は、3DレーザスキャナとLiDARデータを使用して、ロンドンの街並みを完全に3Dで表現するシステムを開発した。
チームが開発したシステムは、物体を効果的に「透けて」、ドライバーの視界から隠れている道路障害物のホログラフィック表現を投影し、サイズと距離が実際の物体と整合する。たとえば、大型トラックによって視界を遮られた道路標識は 3D ホログラムとして表示されるため、ドライバーは標識がどこにあるか、どのような情報が表示されるかを正確に把握できる。
3Dホログラフィックプロジェクション技術は、ドライバーのフロントガラスではなく道路への集中力を維持し、あらゆる角度からリアルタイムで道路の障害物や潜在的な危険を投影することで、交通安全を向上させることができる。成果は、Advanced Optical Materials誌に報告されている。
交通事故は毎年135万人の命を奪い、最大5,000万人の負傷者を出している。技術は、潜在的な危険に関する情報をドライバーに提供することで、これらの数を減らし、交通安全を向上させるために使用できる。現在、これは主にHUDsを使用して行われており、現在の速度や運転方向などの情報を提供できる。
「HUDの背景にある考え方は、ドライバーの目を離さないことである。ほんの一瞬でも道路を見ていないと、衝突事故が起きるのに十分な時間だからである。しかし、これらはフロントガラスの小さな領域に投影された2D画像であるため、ドライバーは前方の道路ではなく、画像を見ている可能性がある」とこの研究の筆頭著者、ケンブリッジ大学工学部のJana Skirnewskajaは,コメントしている。
数年前から、Skirnewskajaと同氏のチームは、道路から目を離さず、ドライバーにより正確な情報を提供することで、交通安全を向上させるヘッドアップディスプレイ(HUD)の代替品の開発に取り組んできた。
「ドライバーの視界のどこにでも情報を投影したいが、圧倒されたり、気が散ったりしないようにしたい。目の前の運転タスクに直接関係のない情報は提供したくない」(Skirnewskaja)。
チームは、拡張現実(AR)ホログラフィック点群ビデオプロジェクションシステムを開発し、ドライバーの視野内に、現実の物体とサイズと距離を合わせた物体を表示する。このシステムは、3DホログラフィックセットアップからのデータとLiDARデータを組み合わせる。LiDARは、パルス光源を使用して物体を照射し、反射光パルスを測定して物体が光源からどの程度離れているかを計算する。
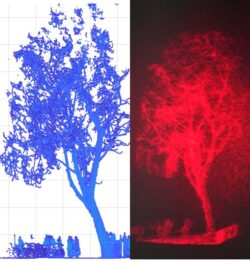
研究チームは、ロンドン中心部にあるUCLキャンパスのマレット・ストリートをスキャンして、このシステムをテストした。LiDAR点群からの情報は、400,000データポイントで構成されるレイヤー化された3Dホログラムに変換された。ドライバーに360°の障害物評価を投影するというコンセプトは、細心の注意を払ったデータ処理から生まれ、各物体の奥行きを明確に把握することができる。
研究チームは、ホログラムがリアルタイムで生成され、投影されるように、スキャンプロセスを高速化した。重要なのは、交通量の多い通りは刻々と変化するため、スキャンは動的な情報を提供できることである。
「収集したデータはクラウドで共有・保存できるため、通りすがりのドライバーが誰でもアクセスできるようになる。これは、リアルタイムの交通情報を提供するために毎日使用しているナビゲーションアプリのより洗練されたバージョンのようなものである。こうすることで、システムは動的であり、危険や障害物が道路の内外に移動するにつれて、変化する状況に適応できる」(Skirnewskaja)。
様々な場所からより多くのデータを収集することで精度が向上するが、研究チームによると、この研究のユニークな貢献は、トラックや建物などの特定のオブジェクトの単一のスキャンからデータポイントを選択することで360°ビューを可能にし、道路の危険の包括的な評価を可能にすることにある。
「1つのオブジェクトに対して最大400,000のデータポイントをスキャンできるが、それは非常にデータ量が多く、そのオブジェクトに関するデータをリアルタイムでスキャン、抽出、投影することが一層困難になる。わずか100個のデータポイントで、物体が何であるか、どの程度の大きさであるかを知ることができる。ドライバーが周囲に何があるかを把握できるように、十分な情報を得る必要がある」(Skirnewskaja)。
今年の初め、Skirnewskajaとチームは、ロンドンの科学博物館で、システムのLiDARデータを搭載したバーチャルリアリティ(VR)ヘッドセットを使用して仮想デモンストレーションを実施した。セッションからのユーザからのフィードバックは、研究者がシステムを改善して、デザインをより包括的でユーザーフレンドリーにするのに役立った。たとえば、眼精疲労を軽減するためにシステムを微調整し、視覚障害を考慮した。
「われわれは、エンドユーザが快適に過ごせるように、アクセスしやすく包括的なシステムを必要としている。システムが気を散らすものなら、それは機能しない。われわれは、ドライバーにとって有用なものを求めており、歩行者や自転車を含むすべての道路利用者の安全性を向上させている」(Skirnewskaja)。
研究チームは現在、Googleと協力して、実際の車でテストできるように技術を開発している。2024年には、公道または私道で路上テストを実施したいと考えている。



![]()
関連雑誌:Vision Systems DESIGN, Vision Systems DESIGN China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.