





Science/Research 詳細
小型ヘルメットの“光”で昆虫サイボーグを制御
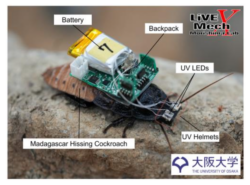
May, 26, 2025, 大阪--大阪大学大学院工学研究科の森島圭祐教授およびChowdhury Mohammad Masum Refat(博士後期課程)の研究グループは、昆虫が紫外線に対して避けるように行動する「負の走光性」を活用し、UV-LED付き小型ヘルメットを操作することで、未知の環境下でも適用できる昆虫サイボーグの自律ナビゲーション方法を開発することに成功した。
従来の昆虫サイボーグは電気刺激による制御が一般的であり、サイボーグの作成には昆虫の感覚器官にダメージを与えるような処置が必要だった。さらに、昆虫が刺激に慣れてしまうことで、制御が難しくなるという課題もあった。今回の新しい手法により、昆虫本来の感覚を損なうことなく、少ない刺激回数で高い制御持続性を実現し、複雑な環境でのナビゲーションに成功した。
この研究では「バイオインテリジェント昆虫サイボーグ(BCI)」という新たな概念を提唱する。BCIは、生物の持つ知能と人工的なフィードバック機構を統合し、将来のバイオハイブリッド・ロボティクスに向けた拡張性があり、かつ環境に優しいモデルを提供する。
この研究成果は、米国科学誌「Advanced Intelligent Systems」に、5月12日(月)午前4時(日本時間)に公開された。
(詳細は、https://resou.osaka-u.ac.jp)


![]()
