





Science/Research 詳細
EPFL、AIによる運動操作の細部のモデル化
December, 6, 2024, Lausanne--EPFLのAlexander Mathis教授が率いるAI研究コラボレーションは、神経機能代替とリハビリテーション技術の開発に不可欠なステップである手の動きについて深い洞察を提供するモデルを作成している。
神経科学や医用生体工学では、人間の手の複雑な動きを正確にモデル化することは、長い間大きな課題だった。現在のモデルは、脳の運動指令と筋肉や腱の物理的動作との間の複雑な相互作用を捉えるのに苦労することがよくある。このギャップは、科学の進歩を妨げるだけでなく、手足の喪失や麻痺を持つ人々の手の機能を回復することを目的とした効果的な神経補綴物の開発も制限する。
EPFLのAlexander Mathis教授と同氏のチームは、これらの複雑な運動機能の理解を大幅に前進させるAI主導のアプローチを開発した。チームは、カリキュラムベースの強化学習と詳細な生体力学シミュレーションを組み合わせた創造的な機械学習戦略を使用した。
「われわれは、人間の運動制御の基本原理に深く掘り下げている」(Alexander Mathis)。
Mathisの研究は、人間が複雑な運動能力を習得する方法から直接インスピレーションを得た、詳細でダイナミック、かつ解剖学的に正確な手の動きのモデルを提示している。この研究は、2022年のNeurIPS会議でMyoChallengeを受賞しただけでなく、その結果はNeuron誌にも掲載された。
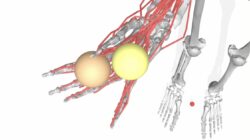
保定球(baoding ball)を仮想的に制御
「この研究で最も素晴らしいのは、長い間謎であった人間の運動制御の核となる原理に深く掘り下げていることだ。われわれは単にモデルを作っているわけではない。われわれは、脳と筋肉がどのように連携するかという基本的なメカニズムを明らかにしている」(Mathis)。
MetaによるNeurIPSチャレンジは、EPFLチームが強化学習として知られるAIの手法への新しいアプローチを見つける動機となった。その課題は、それぞれが高度に協調した方法で39の筋肉によって制御される2つの保定ボールを正確に操作するAIを構築することだった。この一見単純なタスクは、筋肉の同期やバランスの維持など、手の動きの複雑なダイナミクスを考えると、仮想的に再現することは非常に難しい。
このような競争の激しい環境の中で、Alexander MathisのグループのAlberto Chiappa、ジュネーブ大学のAlexandre PougetのグループのPablo Tano と Nisheetの3人の大学院生が、ライバルを大幅に上回る成績を収めた。彼らのAIモデルは、コンペティションの第1フェーズで100%の成功率を達成し、最も近い競合多者を上回った。より難易度の高い第2フェーズでも、彼らのモデルはますます困難な状況でその強さを発揮し、圧倒的なリードを保ちながら優勝を飾った。
タスクを細かく分割し、それを繰り返す
「勝つために、スポーツ科学のパート・ツー・ホール・トレーニング(部分から全体へのトレーニング:part-to-whole traing)と呼ばれるプロセスで人間が高度なスキルを学ぶ方法からインスピレーションを得た」とMathisは言う。
この部分から全体へのアプローチは、AIモデルで使用されるカリキュラム学習方法に影響を与え、手の動きを制御するという複雑なタスクを、より小さく、管理可能な部分に分割した。
「現在の機械学習モデルの限界を克服するために、カリキュラム学習と呼ばれる方法を適用した。32 のステージと 400 時間近くのトレーニングを経て、人間の手のリアルなモデルを正確に制御するためのニューラル ネットワークのトレーニングに成功した」と Alberto Chiappa は話している。
このモデルの成功の主な理由は、モーター プリミティブ(motor primitive)と呼ばれる基本的で反復可能な運動パターンを認識して使用する能力である。エキサイティングな科学的なひねりを加えて、行動を学習するこのアプローチは、新しいタスクを習得するためにモーター・プリミティブがどのように学習されるかを決定する脳の役割について神経科学に情報を与える可能性がある。脳と筋肉の操作の複雑な相互作用は、人間の動きを真に模倣する機械や義肢を作ることがいかに難しいかを示している。
「日常的な様々なタスクを達成するためには、大きな動きと人間の脳に似たモデルが必要になる。各タスクを小さな部分に分割できる場合でも、各タスクを適切に実行するには、これらのモータープリミティブの異なるセットが必要だ」(Mathis)。
AIを生体システムの探索と理解に活用
EPFLのNeuro X Instituteで神経補綴学の第一人者であり、Mathisとの共同研究者であるSilvestro Miceraは、最先端の義肢でさえも、将来の可能性と現在の限界を理解するために、この研究が非常に重要であることを強調している。
「今、われわれが本当に見逃しているのは、指の動きと握りの運動制御がどのように達成されるかについてのより深い理解だ。この仕事は、まさにこの非常に重要な方向に向かっている。われわれは、義肢を神経系に結びつけることがいかに重要であるかを知っている。この研究は、われわれの戦略を強化する強固な科学的基盤を提供してくれる」とMiceraはコメントしている。


![]()
