





Science/Research 詳細
フレキシブル医療ロボット用にローコスト、高精度GPSライクシステム
September, 25, 2020, San Diego--UCSDのロボット研究者が、人の体内のフレキシブル手術ロボットの位置を追跡する手頃な価格、使いやすいシステムを開発した。同システムは,現在の最先端の方法で動作するが、遙かに低価格である。多くの現在の方法は、放射光も必要とするが、このシステムでは不要である。
同システムは、UC San Diego Jacobs工学機械工学教授Tania Morimoto、機械工学Ph.D.学生、Connor Watsonが開発した。研究成果は、IEEE Robotics and Automation Letters.に発表されている。
「連続体医療ロボットは、体内の高度に制約された環境で実によく機能する。剛性ツールと比べると、安全で、適合性がある。しかし、体内でそれらの位置と形状を追跡するのは非常に難しい。それらをもっと簡単に追跡できれば、患者と医師の両方にとって利点は大きい」とMorimotoは話している。
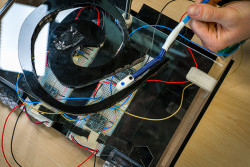
研究チームは、柔軟なロボットの先端にマグネットを組みこんだ。ロボットは、体内の繊細な箇所、脳の動脈経路などで利用できる。「われわれは成長するロボットに働きかけ、ロボットを成長させる液体で加圧する。成長するロボットは、薄いナイロンでできており、ほとんど靴下のように逆転する」とWatsonは説明している。ロボットはソフトであり、成長によって動くので、周囲環境への影響はほとんどなく、医療設定での利用には理想的である。
研究チームは、GPSのように機能する、既存のマグネット位置探査法を使って、ロボットの位置を予測するコンピュータモデルを開発した。GPSサテライトは、スマートフォンにピンを打ち、信号が届くまでの時間に基づいて、スマートフォンのGPSレシーバが、携帯電話の位置を特定できる。同様に、研究チームは、ロボット内蔵のマグネット周りにあるはずの磁界の強さを知ることができる。研究チームは、、磁界の強さを計測するために、ロボットが動作するあたりに慎重に間隔を開けて設置した4個のセンサに依存している。磁界の強さに基づいて、ロボットの先端がある箇所を確定できる。
システム全体は、ロボット、マグネット、マグネットの位置設定を含め、100ドル程度のコストである。
研究チームは、さらに一歩進め、次にニューラルネットワークを訓練して、センサが読み取っているものと,モデルにしたがってセンサが読み取るべきものとの区別を学習させた。その結果、ロボット先端を追跡する位置精度が向上した。
「理想的には、われわれの位置決めツールは、この種の成長ロボット技術の改善に役立てらる、と考えている。われわれのシステムを臨床設定でテストし、最終的にそれが臨床利用されるように、この研究を進める予定である」とMorimotoは話してる。
(詳細は、https://ucsdnews.ucsd.edu)


![]()
