

EMCニュース 詳細
月の裏側での電波望遠鏡建設を支援するロボット
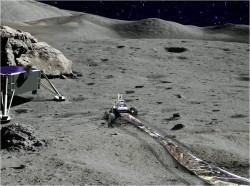
ロボットによって月の裏側に設置される電波望遠鏡アレーの建設に向けて、研究者チームの調査が進展中である。ロボットつまり惑星探査機は、オリオン宇宙船内でNASAの宇宙飛行士によって操作される。月大学ネットワーク宇宙物理学研究所(LUNAR:LunarUniversityNetworkforAstrophysics)のJackBurns氏率いるコロラド大学ボルダー校のチームが「ローバー制御を模倣して、時間差や通信品質など人間の遠隔ロボット制御に関わる潜在的問題を識別する」システムを発見したとSpace.comが報じた。同チームは「小型の惑星探査機が、月に裏側で非常に長いカプトンフィルムの断片をどのようにして巻き取ることができるか」について検討中である。「カプトンは、地味な惑星探査機が展開可能である多くの低周波アンテナ用の丈夫で軽量なバックボーンとして役立つ」と、Burns氏は説明した。無線周波数妨害とは無縁の場所である月の裏側でカプトンのアームを伸ばす。「惑星探査機が展開したそのようなアンテナにより、科学者が最初の星やブラックホールの成り立ちなどの宇宙事象を研究することが可能になる」と研究の支持者たちは言う。Space.comによれば「同チームは、惑星探査機の遠隔操作と関連する複雑な事態を模倣するツールなどの遠隔ロボットシミュレーションシステムを開発した。このツールには、刺激と反応の間の遅延時間である待ち時間や、軌道を周回する宇宙飛行士と惑星表面の探査機の間の通信品質といった問題を軽減する方法を含む」という。Burns氏は「月や火星など惑星表面での探査機操作方法のパラダイムを変えたいと思っている。つまり、リアルタイムで動作するシステムが必要であり、うまく危険回避もしなければならない。こういったリアルタイム遠隔操作は、NASAが過去にほぼ40年間使っていたものとは根本的な原理が全く違う」とBurns氏は付け加えた。詳細はSpace.comのウェブへ。(2015/07/30)

![]()
関連雑誌:
Interference Technology, Interference Technology Europe EMC Guide,
Interference Technology China
![]()

Copyright © 2011-2022 e.x.press Co., Ltd. All rights reserved.