






国内リポート 詳細
世界中で開発が進むソフトロボット
March, 26, 2020--「ロボット」で、マジンガーZや鉄腕アトムなど、「戦争ロボット」をイメージする人は、今では少ないだろうが、工場で機械を組み立てるロボットは、すでに一般化された知識になっている。これらは、堅牢な固いロボットである。「お掃除ロボット」も同様で、床は掃除できるが、天井や窓の掃除ができるほどの柔軟性も機能もなく、軽量でもない。従来型ロボットができないような作業をさせることを目的に、世界中で「ソフトロボット」の開発が進んでいる。ここでは、数ある研究の中から、最近の「ソフトロボット」研究を紹介しておこう。
1.植物のように「生長する」柔軟だが頑丈なロボット
2.コロンビア大学、水で活性化されるロボット
3.筋肉、神経で動く微小バイオハイブリッドロボット
4.SEAS、ソフトパワードロボットRoboBee
「これらのうち、1と2は、かなり実用が近いが、その他は、今後の展開に期待。これ以外でも、スイスのEPFLは、昆虫ロボット、ハエ型ロボット、折り紙からヒントを得たロボットなどを開発している。最後の例は、CES 2020、メルセデス-ベンツのボディに搭載されていた。
1.植物のように「生長する」柔軟だが頑丈なロボット
現在、ロボットは珍しいものではなく、開放レイアウトを非常に簡単にナビゲートする。しかし、狭い空間を縫って進み、雑然とした棚の背後にある製品に到達したり、車のエンジン部品の周囲を通り抜けて、オイルキャップを外すなどは非常に難しい。
MITのエンジニアは、鎖のような付属部分を伸ばして、必要な構成に柔軟にねじり、回すことができるように設計されたロボットを開発した。ロボットは、重い荷物を支えられるほど堅牢であり、狭いスペースで部品を組み立てられるように捻ることができる。作業が完了すると、そのロボットは付属部分を引っ込め、次の作業に適するように、再びそれを伸ばすことができる。長さも形状も様々である。
付属部分の設計は、植物の生長からヒントを得た。植物は、流体で栄養を植物の先端まで輸送する必要がある。栄養物は、そこで固体材料に変換され、少しずつ支持茎を形成する。
同様に、そのロボットは、「生長点」、つまりギアボックスで構成されており、かみ合うブロックの緩い鎖をボックスに変える。ボックス内のギアは、次に鎖ユニットを結合させて、1つずつ、固い付属部分として鎖を送り出す。
研究チームは、植物からヒントを得た「生長するロボット」をIEEEインテリジェントロボット・システム(IROS)国際会議で発表した。研究チームは、グリッパー、カメラ、他のセンサをロボットのギアボックスに搭載し、ロボットが航空機の推進装置に曲がりくねって進み、緩いネジを締める、あるいは周囲の在庫品組織を乱すことなく棚に到達して製品をつかむことができるようにしている。
MIT機械工学教授、Harry Asadaは、自動車のオイル交換の例で、「エンジンルーフを開け、柔軟に、鋭く左右にひねってオイルフィルタに達し、オイルフィルタキャップを外すには十分な力で捻らなければならない」と説明する。
「そのような作業ができるロボットができた。それは、その環境に適合するように伸び、引っ込め、再び別の形で伸びることができる」とAsada研究室の前院生で、研究リーダーのTongxi Yanは話している。
【最後の1フット】
新しいロボットの設計は、「最後の1フット問題」に対処するAsadaの仕事の派生である。これは、ロボットの作業、つまり探査ミッションの最後の一歩、1フットに注意を向ける工学用語である。ロボットは、ほとんどオープンスペースを行き来するかもしれないが、そのミッションの最後の一歩は、作業を完了するためには、もっと厳しい、複雑な空間を、より素早くナビゲートするかも知れない。
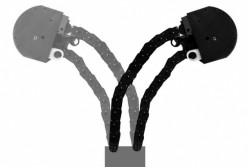
図1 新しい「生長ロボット」は、様々な方向へ生長、伸長するようにプログラムできる。これは、連続的なチェーンユニットをベースにしており、これが固定され「生長する先端」つまりギアボックスから送り出される。MITの研究者によると、伸長可能な付属部分は、狭い空間を曲がりくねって進み、重い荷物を持ち上げることができる。
エンジニアは、様々なコンセプトやプロトタイプを考案して、最後の1フット問題に対処しようとした。柔らかな風船のような材料で作られたロボットが、蔓草のように伸びて狭い裂け目を押し分けて進む。しかし、そのような柔らかな伸縮可能なロボットは、「エンドファクタ」、つまりグリッパ、カメラ、その他のセンサなどの拡張機能をサポートできる堅牢さがない。これらは、ロボットが目標にジリジリと進み、到達してタスクを実行する上で必要になる。
「われわれのソリューションは、実際にはソフトではないが、固い材料を巧妙に使う」(Asada)。
【チェーンリンク】
研究チームが植物生長の一般的な機能エレメントを定義するとすぐに、一般的な意味で伸長可能なロボットでこれを模倣することに関心を向けた。
「そのロボットの実現は、実際の植物とは全く異なるが、それは、一定の抽象レベルで、同じ種類の機能を現している」(Asada)。
研究チームは、ロボットの「生長点」を現すギアボックスを設計した。これは、植物のツボミに似ており、そこではより多くの栄養素がその箇所に流れるように、先端は固い茎を送り出す。ボックス内ではギアとモーターのシステムを適合させる。これは液化した材料を引き上げるために動作する。この場合、3Dプリントされたプラスチックユニットの曲げやすい連鎖が相互に連結されており、自転車のチェーンと同じである。
チェーンがボックスに流れ込むと、それはウインチの周りを回り、第2モーターに送り出される。これは、チェーンの一定ユニットを隣接ユニットに固定するようにプログラムされており、それがボックスから外に送り出されると固い付属部分になる。
研究者は、あるユニットを結合し他の部分を解放したままにして、特殊な形状を形成する、あるいは一定の方向に「生長」(伸長)するようにそのロボットをプログラムできる。実験ではロボットが基点から伸びる、つまり送り出すときに障害物を回避するようロボットをプログラムすることができた。
「様々な場所に固定して多様な方法で曲げ、幅広い動作をさせることができる」とYanは言う。
チェーンが固定されて固いとき、それは、重い1ポンドの重量を支持できる強さである。グリッパがロボットの先端、あるいはギアボックスに取り付けられると、ロボットは狭い場所を縫って進み、ボルトを緩めたり、キャップを開けられるほどに長く伸びる。
自動車の保守は、そのロボットがアシストできる作業の好例である。「ボンネットの下の空間は比較的空いているが、エンジンブロックの周り、あるいはオイルフィルタに達する何かをナビゲートする最後の一歩が、固定アームがナビゲートできないところである。このロボットは、そのようなことができる」とKamienskiは説明している。
2.コロンビア大学、水で活性化されるロボット
コロンビア大学(Columbia University)の研究チームは、機械システムを駆動する材料を開発している。潜在的なアプリケーションは、湿度で窓を開ける、汗を蒸発させる線維である。
モーターや電気なしで活性化できるロボットを考える。そのようなロボットは、含水量や環境の湿気で動き、その動作は設計に織り込まれたパターンにより制御される。
コロンビア大学生化学・物理学准教授、Ozgur Sahin研究室の新しい研究は、エネルギーを身体運動に変換するデバイス、ソフトアクチュエータとなるように作られる材料が強力で柔軟であることを示している。最も重要な点は、浸害耐性である。「環境に対して動的に反応する材料と相互作用し、触れるようなものを作る傾向が強くなっている。われわれは、耐水性があり、同時に水を利用して機械システムの作動に必要な力と、運動を供給する能力が備わっている材料を開発する方法を見いだした」とSahinはコメントしている。
研究成果は、Advanced Materials Technologiesに発表された。ほとんどの従来型ロボットシステムは固い、つまりコンピュータを使って機能させる必要がある金属構造でできている。ソフトロボットは、機械的強度を達成するために固い骨格も電気も使わない材料で作られる。それらは固いロボットに比べると、容易に作製でき、安価である。
コロンビア大学のチームが開発した材料は、胞子、栄養補助食品としてよく使われるバクテリアによって生成されるユニット、これと接着剤を新たに組合せたものである。それらは、合成ポリマなど、一般にハードアクチュエータに使われている材料の代替となり、またソフトアクチュエータに一般に使用されているゲルよりも優れている。その新材料に比べるとゲルは、反応が遅く、強い力を生み出せず、通常、直接水に触れると役に立たなくなる。
個々の胞子は耐水性であるが、それらは非常に小さいので、光化学プロセスにより結合されなければならない。ここでは高強度光が瞬時にそれらを接着させて複合材料にする。研究チームは、美容院でマニキュア液の硬化に使用されている安価な商用UV光を使った。
一旦硬化されると、その材料は層状にスタックされて微小構造を形成する。これは、湿度、湿気で拡大、収縮し、機械的動作の力と運動を生み出す。
ポスドク研究者で、論文の筆頭著者Onur Cakmakによると、それは砂のシートを造るようなものである。材料は、まさに粒状である。
パターンデザインに誘導されると、その多孔質複合材料は、湿気、水に反応して曲り、折り畳まれ、開かれる。これは、そのソフトアクチュエータに、自然の生物に極めて似通った、環境に対する機敏性、適合性を与えるものである。Cakmakによると、これらの材料から使えるシステムを造る場合、パターン化できることは極めて重要である。
その新しい材料には、実用的なものから芸術作品まで、多くの潜在的なアプリケーションがある。耐水性、湿気に反応する複合材料でできたアクチュエータは、湿気が高くなり過ぎたときにビルの窓を開けるために使える。また、その材料は、競技用ウエアの繊維に加えて汗の発散を早くするために役立てることが可能である。「材料をデザイナーに供給し迅速に取り扱い、アイデアを実現できるようにしている」とSahinは話している。
アプリケーションは、数年機能するはずであるが、まださらなるテストを必要としている。しかし、短期間用に設計されたものはすでに利用可能である。
「これに取りかかることで、われわれは多くの他の用途も学んだ。一部は設計に関して、他にはわれわれの周囲の製品の一部となる材料に関してである。それらは、これのインパクトがいずれ出てくる箇所である」とSahinは話している。

侵襲性が少なく、人と環境に適合的なアクティブ材料、表面は、ロボット応用にとって極めて重要である。湿気、水に反応する材料が、出現した。ロボットシステムに、通常、使用されているアクチュエータの多様な代替である。
3.筋肉、神経で動く微小バイオハイブリッドロボット
イリノイ大学(University of Illinois)の研究チームは、光の刺激で始動する神経筋肉組織で駆動するソフトロボットデバイスを開発した。これにより機械工学が自律バイオロボット開発に向けて一歩前進する。
2014年イリノイ大学、機械科学・工学教授Taher Saifとバイオエンジニアリング教授、Rashid Bashirのチームは、初の自己推進バイオハイブリッドスイミング、ウォーキングロボットを共同開発した。これはラット(ネズミ)から採った鼓動する心筋細胞を動力にしている。
「われわれ初のスイミング研究は、幹細胞をモデルにしたロボットが実際に泳げることの実証に成功した。その世代のシングルテールロボットは、独自に鼓動する心臓組織を利用したが、環境を感知したり、決定を下すことはできなかった」とSaifはコメントしている。
National Academy of Sciencesの論文集に発表された新研究で、Saifをリーダーとする研究チームは、オンボードの運動神経細胞に刺激された骨格筋組織を動力とする新しい世代の2テールロボットを実証している。そのニューロン(神経細胞)は、光遺伝学特性を持ち光に晒されると、ニューロンが発火して筋肉を活性化させる。
「われわれは、マウスの幹細胞から採った光遺伝学神経細胞培養を筋肉組織に隣接させた。そのニューロンは、筋肉に向かって進み、神経筋肉接合部を形成し、スイマーは独力で結集する」とSaifは話している。
神経筋肉組織が、合成バイオロボット骨格に適合していることを確認後、研究チームはスイマーの能力を最適化する作業を行った。
「われわれは、コンピュータモデルを使い、機械科学/光学教授、Mattia Gazzolaをリーダーとして、どの物理的特性が最速で最も効率的なスイミングに行きつくかを判断した。例えば、バイオハイブリッドスイマーにとって最も効率的な設計に、テール数やテール長の変形を検討した」とSaifは話している。
「生物学的アクチュエータ、つまりバイオボットが他の技術ほど成熟していないことを考えると、大きな力を生み出すことはできない。つまり、その動きを制御するのは難しい、と言うことだ。バイオボットが、周囲に成長し相互作用するスカフォールドを慎重に設計することが極めて重要である。これは、その技術を最大限に活用して移動機能を達成するためである。われわれが実施するコンピュータシミュレーションは、この作業で重要な役割を担っている。多くの可能な設計をカバーし、実世界のテストに最も有望なものを選択することができるからである」とGazzolaは説明している。
「ニューロンで筋運動を駆動する能力は、ハイブリッドシステム内に神経ユニットの組み込みを進めるための道を開く。われわれは、動物の神経制御を理解しているため神経網の階層的組織を使い、バイオハイブリッド神経筋設計を前進させることは可能である」(Saif)。
研究チームは、この進歩が多細胞工学生命組織につながると考えている。バイオエンジニアリング、医療、自己回復材料技術などアプリケーションで環境信号にインテリジェントに反応できるシステムである。とは言え、チームの認識では、生きた組織と同様に、バイオハイブリッドマシーンは、全く同じものを2つ開発することはできない。

図3 ソフトロボット構造を作動させる筋肉を使い、ハイブリッドマシーンが開発された。そのようなシステムの具体化に神経の組み込むことで、それらをインテリジェントマシーンに変えることができる。例えば、感覚神経を使って環境信号を検出し、その神経回路を通じて様々な運動パターンに反応し調整できる。しかし、そのような感覚 – 運動様式は、筋活動に命令する神経ユニットの能力に依存しているので、運動神経を通じた作動が最初の目標である。ここでは、その目標を達成し、バイオハイブリッドスイマーの神経筋差動を実証した。All-soft skin-like structures for robotic locomotion and transportation’ by Jianglong Guo,
Chaoqun Xiang, Andrew Conn, and Jonathan Rossiter in Soft Robotics
「双子が全く同じでないように、同じ機能を持つように設計された2つの機械も同じではない。一方は他方に比べて動きが速く、損傷からの回復が異なるかも知れない。つまり、生きた機械固有の特性である」とSaifはコメントしている。
4.SEAS、ソフトパワードロボットRoboBee
SEASハーバードマイクロロボティクス研究所Harvard Micro-robotics Laboratory)で、壁に向かって疾走し、ガラスボックスにぶつかるRoboBeeが研究者の間でパニックを引き起こしたが、もはやそんなことはない。
SEASとWyss Institute for Bio-logically Inspired Engineeringの研究者は、ソフトな人工筋を装備した障害耐性の高いRoboBeeを開発した。これは壁に激突して床に落下し、他のRoboBeeと衝突することはあり得るが、壊れることはない。RoboBeeは、制御飛行を達成するためのソフトアクチュエータを備えた初のマイクロロボットである。
「非常に障害耐性が高いため、ソフトアクチュエータから移動ロボットを作るためのマイクロロボット分野では大きな後押しがあった。しかし、その分野の多くの人々は、飛行ロボットにそれが使えるかどうかについて懐疑的であった。そのアクチュエータのパワー密度には十分な強さがなく、制御が難しいことが知られていたからである。われわれのアクチュエータは、ホバリング飛行を達成できるだけの十分なパワー密度と制御性がある」と論文の筆頭著者Yufeng Chenは説明している。
論文は、Natureに発表された。
パワー密度の問題を解決するために研究チームは、電気駆動ソフトアクチュエータに立脚した。これは、材料のTarr Family教授、David Clarkeの研究室で開発されたものである。これらソフトアクチュエータは、誘電エラストマを使って作られている。これは、優れた絶縁特性を持ち、電界を印加すると変形するソフト材料である。
電極伝導性を改善することで、研究チームはアクチュエータの500Hz動作を可能にした。これは、以前の同じようなロボットで用いられた固いアクチュエータと同等である。
ソフトアクチュエータを扱うときのもう1つの課題は、システムが捻れて不安定になりがちなことである。この問題を解決するために研究チームは、拘束縦糸で軽量エアフレームを作った。これは、アクチュエータが捻れないようにするためである。
ソフトアクチュエータは、この小さなロボットでは、簡単に組み立てられ、取り換えられる。様々な飛行能力を証明するために研究チームは、複数のソフトパワーRoboBeeの異なるモデルを作製した。2翼モデルは、離陸はするが、制御性がなかった。4翼、2アクチュエータモデルは、雑然とした環境を飛ぶことができ、1回の飛行で多重衝突を克服できた。
「小型、低質量ロボットの1つの利点は、外部衝撃に対する強靱性である。ソフトアクチュエータは、従来の作動戦略よりも衝撃をよく吸収できるので、それが追加の利点になる。これは、探査やレスキューミッションで瓦礫をぬって飛ぶような潜在的アプリケーションでは役に立つ」と論文の共著者、SEAS前院生、Elizabeth Farrell Helblingは話している。
8翼、4アクチュエータモデルは制御されたホバリングを実証、これはソフトパワー飛行マイクロロボットでは初めてである。
次の研究者の狙いは、ソフトパワーロボットの効率である。この点は、まだ従来の飛行ロボットから著しく遅れている。
「筋肉のような特性と電活のソフトアクチュエータは、ロボット工学では大きな課題である。われわれが高性能人工筋肉を設計できれば、われわれは、どんなロボットでも制限なく作製できる」とRobert Woodはコメントしている。

図4 】4アクチュエータ、 8 翼ソフトRoboBee ( 画像提供 The Harvard MicroRobotics Lab/ Harvard SEAS


![]()
関連雑誌:Vision Systems DESIGN, Vision Systems DESIGN China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.