






Pick up magazine feature 詳細
照明の課題
March, 5, 2026--信頼性の高いマシンビジョンアプリケーションの実現に効果的な照明設計戦略
ペリー・ウェスト
スペキュラーサーフェス(鏡面)、アンビエントライト(周辺光)、複雑な検査要件など、マシンビジョン照明における課題を解決する方法について、業界専門家として解説する。
マシンビジョンが1980年頃に登場して以来、マシンビジョンアプリケーション用照明の設計は、マシンビジョンシステム設計者にとっての課題となってきた。ビジョンシステム設計者は今日もこの課題に挑み続けており、この先も長く向き合うことになるだろう。
マシンビジョン用の照明設計には多くの課題が存在する。本稿では、そのうちの5つについて解説する。経験を重ねていくにつれて、さらなる課題が見えてくるにちがいない。
光学の専門知識
ほとんどのマシンビジョン開発者が、光物理学の専門家ではない。むしろ、ソフトウエア開発、機械工学、制御工学など、マシンビジョンシステムの設計に役立つ、その他の分野の専門家である可能性のほうが高い。照明に関しては、最も重要なのは光物理学である。すなわち、光が物体とどのように相互作用するか、そして、最大限のコントラストを生成する光をどのようにして提供するかである。
マシンビジョンに従事し始めたとき、筆者の専門は電子工学であり、光学ではなかった。マシンビジョンに長く携わってきたため、筆者には幸いなことに師と仰ぐ人々がいる。例えば、Hal Schroeder氏(元米EG&G Reticon社)、Ken Womak氏(元米Eastman Kodak社)、Matt Young氏(元米国立標準技術研究所[NIST])、Kevin Harding氏(米Optical Metrology Solutions社)、Greg Hollows氏(米Edmund Optics社)、Nitan Sampat氏(米Edmund Optics社)、Stuart Singer氏(米Schnei der Optics社)、Nick Sischka氏(米Edmund Optics社)などである。
これらの専門家からの知見や助言に加えて、マシンビジョンに適用される光学の多くの側面について、調べて学習する必要もあった。筆者は今も学び続けている。
すべてのマシンビジョン開発者が行うべきことは、光学原理をマシンビジョンに応用する方法を理解するための手助けをしてくれる、良き指導者との関係を築くことである。助言者に加えて、健全な好奇心と自主的な学習が必要である。出発点として、https://ww.autovis.com/resources/videos/opticsで、マシンビジョンを対象とした光学のオンライン講座を提供しているので参考にしてほしい。
幸いなことに、ほぼすべてのアプリケーションで、照明設計を成功させるために、光物理学者になる必要はなく、複雑な方程式を解く必要はなく、特殊なソフトウエア(図1)を用意する必要もない。光学原理を理解し、イメージングを行うシーンでそれらがどのように作用するかを認識していれば、ほぼ必ず十分である。
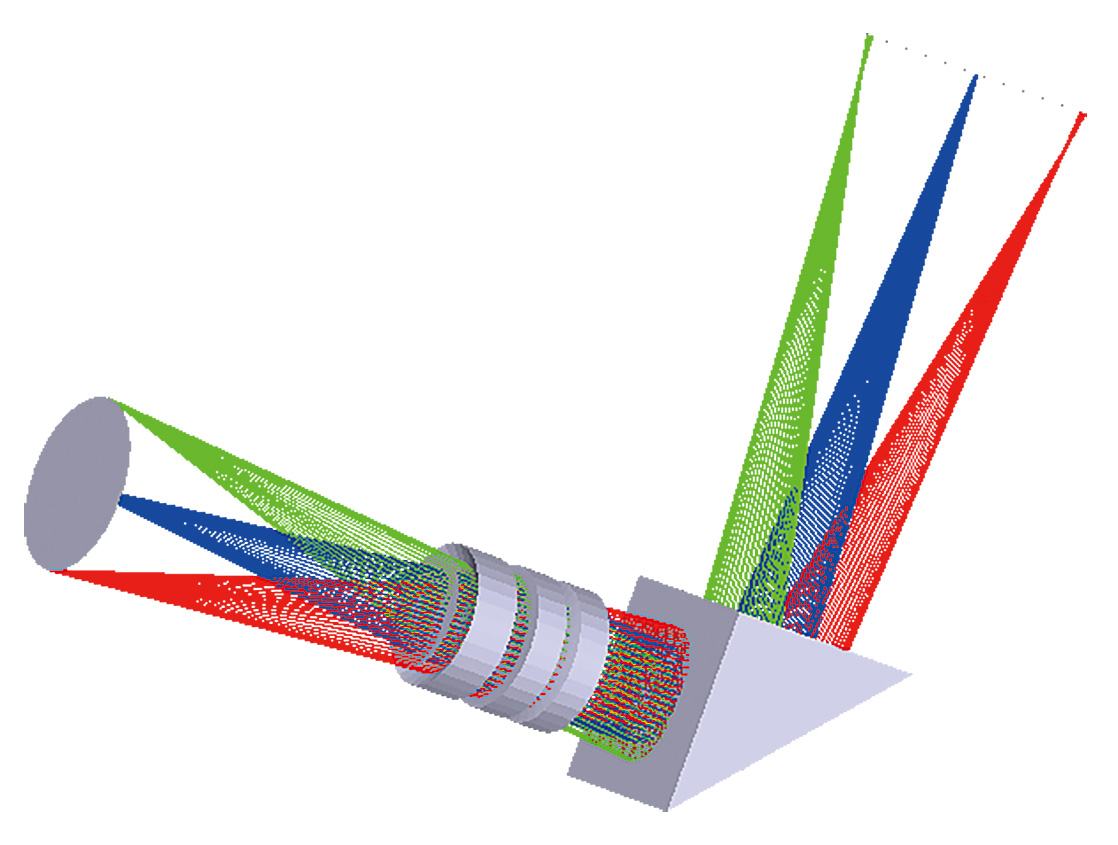
図1 マシンビジョンアプリケーション用の照明を開発するには、光物理学の基本的な理解が役立つ。例えば、光学設計における光線追跡(Optical Design RayTrace、レンズを通過する光線の経路をシミュレーションするための計算手法)である(提供:オートメーテッド・ビジョン・システムズ社)
複雑な要件
マシンビジョンシステムと照明における課題の1つは、複雑な要件への対応である。多くの場合でそれは、外観欠陥の検査を目的としたものである(図2)。通常は、1種類の欠陥だけでなく、傷、へこみ、欠け、汚れなど、一連のさまざまな欠陥を検出することが求められる。それらの個々の欠陥に対してコントラストを生成するには、異なる照明ソリューションが必要となる可能性がある。照明ソリューションごとに、それぞれ異なる照明技術、カメラ露光、処理画像が必要となる。
通常は、単一の照明技術だけを利用して個々の異なる欠陥に対していくらかのコントラストを生成する、妥協策を見出そうとしがちである。そうするとソフトウエアは、低コントラストで、往々にしてややノイズが乗った画像を処理しなければならない。ビジョンシステムの欠陥検出精度は損なわれる。検出する欠陥の種類が多いほど、妥協の度合いは大きくなる。
部品の表面の傷と変色を検出しなければならないビジョンシステムを例に挙げよう。傷は表面の機械的変化であり、暗視野照明で最もよく検出できる場合が多い。変色は表面を機械的に変化させるものではなく、検出には明視野照明が必要となる可能性が高い。1台のカメラに対して明視野光源と暗視野光源の両方を使用することが可能である。必要に応じて2つの光源をストロボ点滅させて非常に高速に取得した2枚の画像を使用すれば、このアプリケーションに対応できる。
しかし、欠陥の種類が増えるとどうなるだろうか。一連の欠陥を検出するために必要な照明ソリューションの数が増加し、ビジョンシステムソリューションは煩雑になる。
ビジョンシステムの設計を簡素化する方法は、ビジョンシステムに検出させる欠陥の種類を制限することである。最初に、各欠陥を発生頻度の順に並べたパレート図を作成する。通常は、発生頻度の高い欠陥と低い欠陥の間に明らかな境目がある。発生頻度の高い欠陥の検出のみに特化してビジョンシステムを構築し、発生頻度の低い欠陥は除外する。一般的に、製造部門と品質管理部門はこの方法に難色を示す。人間の目で検査すれば、あらゆる欠陥を検出できると考えられているためである。

図2 いくつかの異なる欠陥(提供:ペリー・ウェスト、オートメーテッド・ビジョン・システムズ社)
ソフトウエアだけでは解決できないという問題
画像処理アルゴリズムをうまく利用すれば、光学や照明のあらゆる欠点が軽減されると、人々は日々期待している。画像処理にディープラーニングが用いられるようになったことで、この期待は爆発的に高まっている。
AI/ディープラーニングによって、照明にさほど注意を払う必要のないソリューションが生まれるだろうと考える人もいる。明らかにAI/ディープラーニングは、従来のルールベースのプログラミングでは難しい画像内の変化に対応できる。しかし、ルールベースのプログラミングと同様に、画像に何が表示されていて何が表示されていないかが、AI/ディープラーニングの結果に影響を与える。ディープラーニングの研究者は90%の精度で満足し、98%の精度で大いに満足する。しかし、産業界では一般的に、シックスシグマ(6σ)の性能が求められる。従って99.9%というのが、ビジョンシステム精度のより適切な目標値である。
では、自動運転車はどうだろうか。自動運転車は、人工照明なしで非常に高い信頼性が求められる。自動運転車向けのビジョンアプリケーションは、ほとんどのマシンビジョンシステムにないいくつかの特性を備える。1つ目は、センサフュージョンである。自動運転車はビジョンだけを頼りに走行するのではなく、レーダや、多くの場合でライダセンサからのデータを、ビジョンデータに組み合わせる。
2つ目は、時系列である。自動運転車向けのビジョンシステムは、画像データを連続的なビデオストリームとして取得して分析する。時間間隔が短いために、ある画像には映るが次の画像には映らないものをも、捉えることができる。
3つ目は、運転ポリシーである。自動運転車は、分析されたビジョンストリームの誤りを補正して問題を防ぐ、運転ポリシーを備えている。製造環境に設置されたマシンビジョンシステムは、上記のいずれの特性も持たないため、1台または一連のカメラからの1枚の画像に基づいて、処理を行わなければならない。
コンピューティングの最も初期の時代から、「garbage in, garbage out」(ゴミを入れればゴミが出てくる)という表現が、注意を払おうとする人々の標語として使われてきた。質の低い画像はゴミであり、画像処理に必ず課題をもたらし、質の高い画像よりも低い精度の結果を招く。
マシンビジョンアプリケーション用に適切に設計された照明の必要性は、今後も消えることはない。
周辺光
周辺光とは、ビジョンシステムアプリケーション用に特別に設計された光を除く、ビジョンシステムの近くに存在するあらゆる光のことである。
周辺光には、次の3つの真実がある。
・ほとんど常に存在する。
・ビジョンシステム開発者が制御できるものではない。
・予測不能な形で変化する。
周辺光の源は何か。1つは、作業員のためのエリア照明である。これは、グレアやギラつきにつながる場合が多いので、想定して軽減する必要がある。また、エリア照明用のランプや器具は故障することがあり、修理に数時間から数日を要する場合もある。ビジョンシステムは、エリア照明が使えない間も確実に動作し続ける必要がある。その他の可変要素としては、フォークリフトの点滅灯や、さらには、そばを通りかかった作業員が着用する白いシャツやスモックに周辺光が反射してシーンに映り込む可能性も考えられる。
主に太陽からの屋外光は、特に難しい。光度が高く、一日の時間、季節、天候によって変化するためである。窓、天窓、開閉可能な扉は、屋外光の源となる。直射日光に対処する唯一の実用的な方法は、それをシーンとカメラの両方から遮断することである。
常に念頭に置いてほしいのは、ビジョンシステムは長期間にわたって確実に動作する可能性があるということである。そして、ビジョンシステムを移動させた場合は、周辺光環境が変わり、ビジョンシステムの性能が低下する可能性がある。移動の前に、ビジョンシステムの確実な動作を維持するために必要な措置を評価するために、ビジョンエンジニアが呼ばれることは稀である。しかし、ビジョンシステムの性能が許容レベルを下回った場合は、ビジョンエンジニアは迅速な修正措置によってそれに対応しなければならない。
周辺光の影響を軽減するための確立された方法が存在する。1つ目は、筐体や覆いによって周辺光を遮断することである。ビジョンシステムが設置されているエリアへのアクセスが妨げられ、保守がより困難になるため、この方法を好まないビジョンエンジニアもいる。
非常に一般的な2つ目の方法は、狭帯域の照明と、それに合ったフィルタをカメラに対して使用するものである。このフィルタは、設計された光エネルギーの大部分を通過させつつ、一般的に広帯域にわたる周辺光の大部分を抑制する。この方法は、カラーイメージングが必要な場合を除き、極めて効果的である。
3つ目の方法は、非常に高輝度な光源によって周辺光を打ち消すというものである。パルス発光と過駆動が可能なLEDを使用すると、この方法は非常に実用的である。どのようなビジョンシステム設計に対しても、2つまたは3つの方法を併用することを検討してほしい。
鏡面
鏡、または、鏡と同じように鏡面反射する表面ほど、イメージングが難しいものはない(図3)。鏡面には次の2つの課題がある。
・表面を明るく表示しなければならない場合は、表面が均等に照らされるように照明を当てる必要がある。
・表面を暗く表示しなければならない場合は、周辺光や人工照明からのギラつきやグレアがカメラのレンズに到達するのを防ぐ必要がある。
画像において鏡面を明るく表示するための最も一般的な方法は、ドーム照明(図4)やフラットドーム照明(図5)のような拡散性の高い光源を使用することである。鏡面上の個々の点が、広範囲の角度から光によって照らされる一方で、物体上の任意の点からの光線のうちのごく一部しか、カメラレンズの入射瞳へと反射されない。
もう1つの方法は、ポラライザとアナライザのペアを使用して、鏡面を撮影し、人工照明によるグレアを除去するものである(図6)。ポラライザは、光源の上に配置された直線偏光素子で、アナライザは、カメラレンズの上に配置された直線偏光素子である。シーンは偏光によって照らされる。鏡面反射では光の偏光状態が維持されるが、拡散反射による光の散乱によって偏光状態は失われる。アナライザを回転させることにより、鏡面反射光が除去される。拡散反射光のかなりの部分がアナライザを通過することにより、カメラ内に像が形成される。

図3 光沢(鏡面)仕上げが施された部品(提供:ペリー・ウェスト、オートメーテッド・ビジョン・システムズ社)
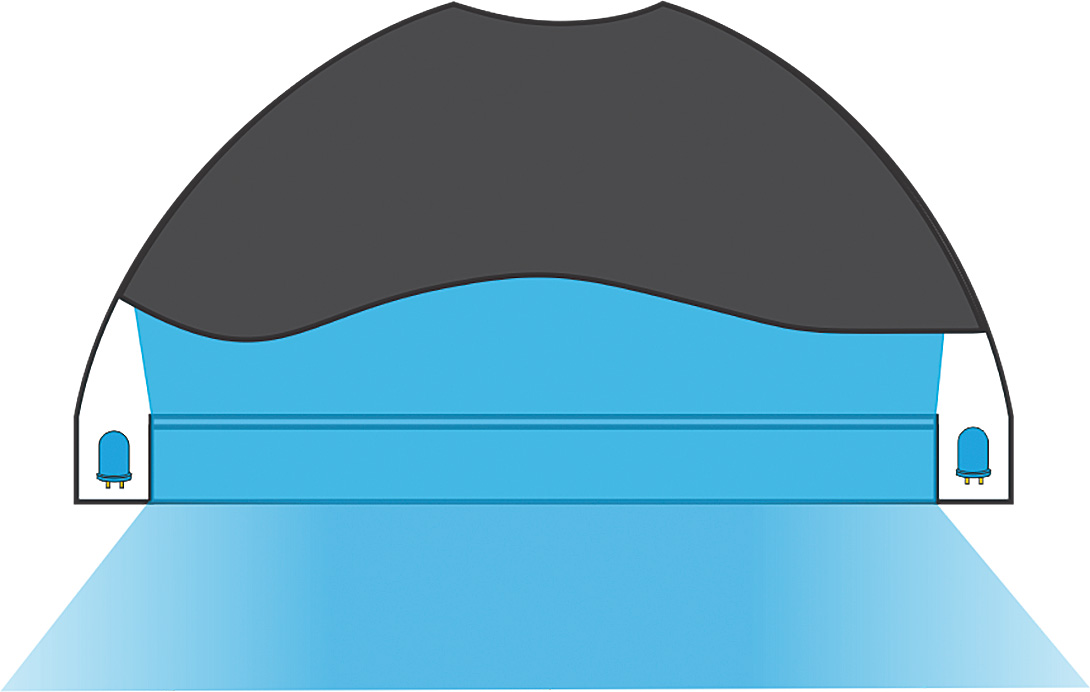
図4 ドーム照明の例(提供:ペリー・ウェスト、オートメーテッド・ビジョン・システムズ社)

図5 フラットドーム照明の例(Metaphase Technologies社の画像をペリー・ウェスト、オートメーテッド・ビジョン・システムズ社が提供)
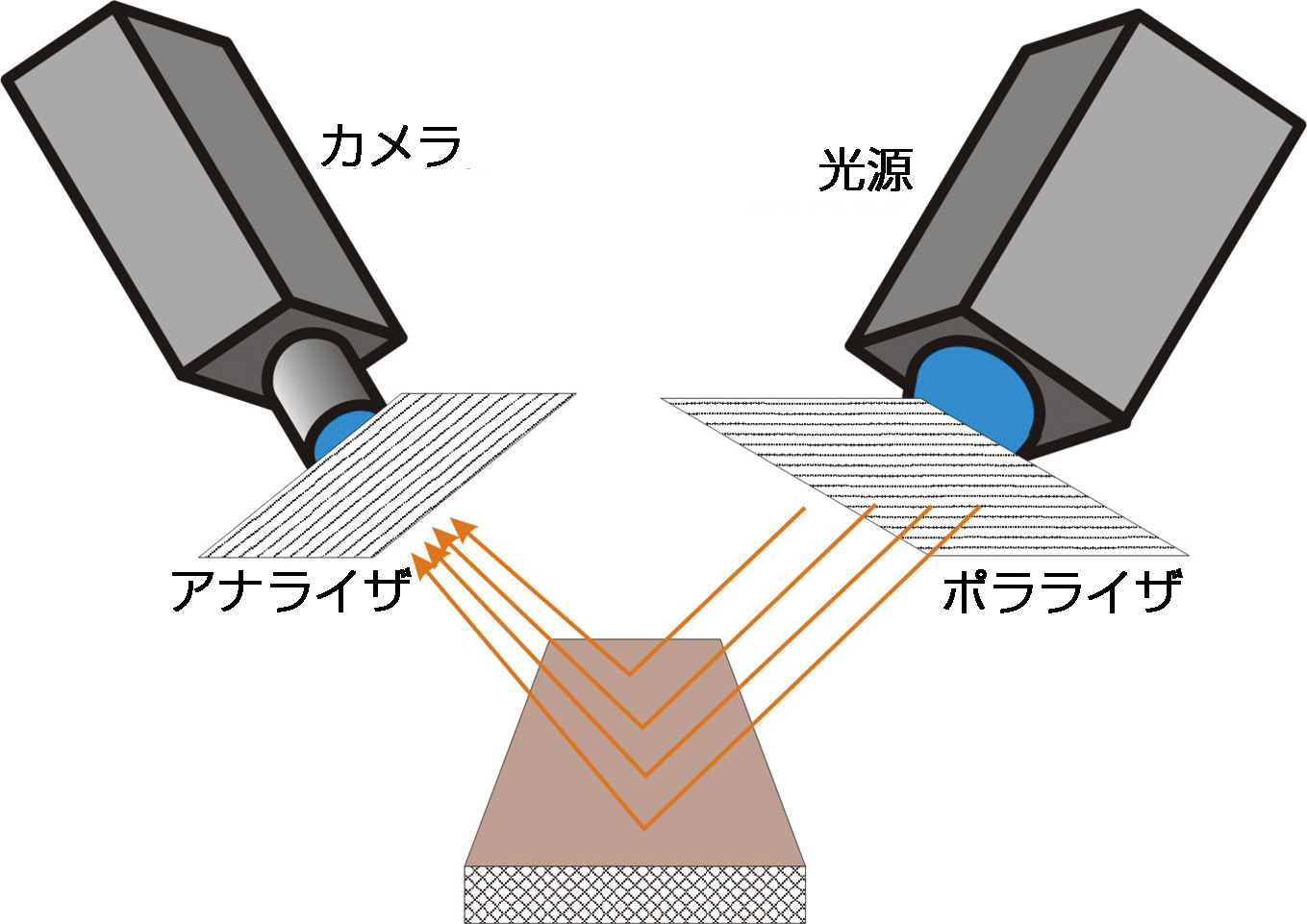
図6 ポラライザとアナライザのペアを使用して、鏡面を撮影するか、人工照明によるグレアを除去する(提供:ペリー・ウェスト、オートメーテッド・ビジョン・システムズ社)
結論
信頼性の高いマシンビジョンシステム性能を確保するために、照明の設計は極めて重要である。その設計には独特の課題がある。しかし、大半の課題は、既に表面化して適切に解決されている。プロジェクトの照明設計工程を軽視してはならない。プロジェクトで困難に見える課題に直面した場合は、経験豊富な照明企業やコンサルタントに相談してほしい。彼らは大抵の場合、課題を乗り越えられるように手引きし、プロジェクトを成功へと導いてくれる。ただし、プロジェクトのできるだけ早い段階で助言を求めてほしい。一般的に、プロジェクトの遅い段階で照明の課題に対応すると、実装できるソリューションの種類は制約されることになる。
著者紹介
ペリー・ウェスト(Perry West)は、米オートメーテッド・ビジョン・システムズ社(Automated Vision Systems)の創業者兼社長。URL: ww.autovis.com


![]()
関連雑誌:Vision Systems DESIGN, Vision Systems DESIGN China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.