






Exclusive article 詳細
正確なタイミングとデータ融合:なぜ同期がモバイルマッピングに重要なのか
September, 9, 2025--いくらセンサがよくても、同期しなければ利用可能なデータを得ることができない。
カメラシステムでは、解像度、鮮明さ、校正といったことが話題になる。しかし、カメラ、LiDAR、その他のセンサが一緒に稼働するモバイルマッピングシステムでは、すべてを同期させなければ、どれひとつ機能しない。
全球測位衛星システム(GNSS)やLiDAR、カメラデータのアライメントにわずかなズレがあれば、すぐに気づくはずである。色調の変化やレイヤー間のドリフト、オーバーラップ不足が現れるからだ。これらを後工程で修正すると、時間がかかり、正確性や結果への信頼が損なわれる。
ここでは、信頼性の高いクリーンなデータが必要なモバイルマッピングチームから学んだこと、特に複数のセンサタイプを統合する場合のポイントについて説明する。
まずはトリガーから:時間と距離
センサやカメラのトリガーは、システムごとに異なる。時間に基づいてフレームを(100ミリ秒ごとなどで)取得するものもその一例である。ビデオならばそれでも良いだろうが、モバイルマッピングシステムでは、車両速度が常に変化する。本当に必要なのは、フレーム間の距離を一貫して保つことだ。このため、ギャップが生じたり不要な重なりのないよう、シーンを均等にキャプチャーする。
ここでは、距離測定器(DMI)が有効である。固定された時間間隔ではなく、地上での移動距離に基づいてパルスを送ることで、速度に関係なく、カバレージが均一になり、オーバーラップも一定に保たれる。
GNSS受信機から出力される1秒あたりのパルス数(PPS)信号と組み合わせることで、すべての取得フレーム(画像、点群、内部測定ユニット(IMU)データ)を、時間・空間的に単一の正確な瞬間に合わせることができる。

こうして各画像をペアとなるLiDARや位置データと物理的に同じ位置に対応させることができ、しかもフレームやパルス単位で可能になる。
同期ドリフトがなぜ実際に問題になるのか
タイミングを完璧にできない場合、以下の問題が発生する。
・LiDARでスキャンし検出した電柱について、対応する画像が遅延すると、各3次元位置でのテクスチャや色と関連付けるのが困難になる。
・画像のタイムスタンプもGNSSと合わず、地理的な位置が不正確になる。
・IMUデータでは、カメラがトリガーされた時点と異なる車両の向きが伝えられ、組み合わせたデータセットに投影や誤りが生じる。
・点群の着色が不正確になり、セグメンテーションソフトウェアもフィーチャーを誤分類するようになる。
わずか10~20ミリ秒のずれでも連鎖的に問題を引き起こす可能性があり、再処理や手動修正が必要となったり、仕様を満たさないデータが生成されたりする。
正確なタイミングで,後処理のいらないクリーンなデータを
同期を厳格に行うシステムでは、良好なデータが取得できるだけでなく、全ての工程が高速化される。
正確なトリガーにより各画像のタイムスタンプが明確になると、GNSSやLiDARとの整合がシンプルになり点群の着色も正確になるので、シーンのセグメンテーションの信頼性が高まる。後処理のワークフローもスムーズになり、手動修正やパッチの頻度も低減できる。
モバイルマッピングシステムはデータ量が膨大で納期が厳しい環境ですが、同期を完璧にすることで、リスクやリワークを軽減できる。
同期性能を評価する際の確認事項
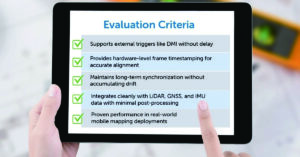
カメラシステムの選定にあたり、技術チームが尋ねる実際的な質問は次のとおりである。
・DMIのような外部トリガーを受け付け、遅延なく応答できるか
・信頼性の高いアライメントがとれるよう、ハードウエアレベルでフレームにタイムスタンプを付与しているか
・ドリフトが蓄積されず、長期の調査ミッションでも同期を保てるか
・後処理での大幅な補正の必要がなく、LiDAR、GNSS、IMUデータと明確に統合できるか
・実際のモバイルマッピングアプリケーションにおいて、これまで問題なく利用されているか
上記の項目のなかで不明確なものは、処理工程で問題になる可能性がある。
こういった項目を確認しておくことで、単に機能が備わったシステムなのか、それともプロジェクトやプラットフォームを問わず一貫したパフォーマンスを発揮するシステムなのかが区別できる。
なぜフィールドで同期が問題になるのか
同期とは実験室の仕様ではなく、システムレベルでの実現手段です。同期が適切に行われると、モバイルマッピングプラットフォームからは信頼性が高く分析も容易な、高度に統合されたデータを容易に提供できる。
同期が正しく行われなければ、時間が無駄になり、正確さや信用も失われる。


![]()
関連雑誌:Vision Systems DESIGN, Vision Systems DESIGN China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.