

ニュース 詳細
インテリジェント制御の装具に関する研究プロジェクトが成功裏に終了(2/2)
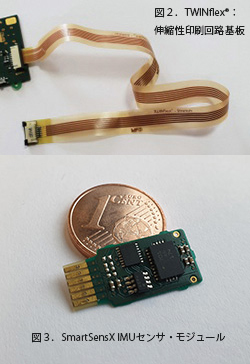
(1/2より続き)「PowerGraspプロジェクトの取り組みは、重要な一歩を踏み出した。頭上作業時に手、腕、肩をサポートするソフトな可搬型ロボットシステムの研究と実装に加えて、柔軟な伸縮性印刷回路基板の使用により電子部品と空気圧システムの小型化を推進することができた」とKostelnik博士はまとめている。
この技術は基本的に、日常生活で高齢者や身体の不自由な方を支援することもできる。長期的には、プロジェクトパートナーは、身体運動に関わるあらゆる筋肉や関節など、つまりすべての動きをサポートするスーツの開発に取り組んでいる。この技術は今後1年間、さまざまな展示会や会議でデモンストレーションされる予定。同プロジェクトで開発された個々の構成要素の多くは、ロボット工学、センサ、携帯用電子機器、人間と機械の相互作用だけでなく、センサや電子機器ベースの他の分野でも革新につながるだろう。
詳細は下記のウェブへ。(2020/02/10)
● Würth Elektronikグループ:
https://www.we-online.com/web/en/leiterplatten/willkommen_/Willkommen.php
● PowerGraspプロジェクト:
https://www.we-online.com/web/en/leiterplatten/news_leiterplatte/News_Detail_Leiterplatte_112544.php

![]()
関連雑誌:
Interference Technology, Interference Technology Europe EMC Guide,
Interference Technology China
![]()

Copyright © 2011-2022 e.x.press Co., Ltd. All rights reserved.