





Open +

コヒレント特設ページはこちら

Science/Research 詳細
多足ロボットの機敏な歩行を実現する新技術
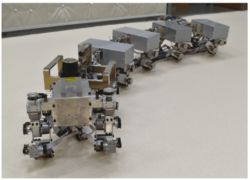
May, 30, 2023, 大阪--大阪大学大学院基礎工学研究科の青井伸也教授の研究グループは、不安定性を利用した多足ロボットの機敏で効率の良い歩行の実現に成功した。
多足ロボットは、多くの足を持つために耐故障性や転倒回避性に優れており、様々な場所で活用できると期待されている。しかしながら、環境と複雑に相互作用する多くの足の運動計画や制御は難しく、その実現は困難だった。特に、地面につけている多くの足が障害となり、急旋回のような機敏な運動を行うことは至難の業だった。
青井伸也教授の研究グループでは、回転バネにより柔軟な体軸を持つ多足ロボットにおいて、そのバネ剛性をパラメータとするピッチフォーク分岐によって直線歩行が不安定化し、剛性に依存した半径を持つ円歩行に遷移することを明らかにしていた(Aoi et al., 2022)。今回、その剛性を変化させる機構をロボットに搭載することで直線歩行の不安定化を自在に引き起こし、さらにそれによって遷移する円歩行の半径を制御することで、機敏で効率の良い歩行の実現に成功した。これにより、惑星探査や災害現場のような人が立ち入ることの難しい場所など、様々な状況での利用に応用されることが期待される。
研究成果は、米国科学誌「Soft Robotics」に、2023年5月29日(月)13時(日本時間)に公開された。
(詳細は、https://resou.osaka-u.ac.jp)



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
×
