






Science/Research 詳細
量子LiDARプロトタイプ、水中でリアルタイム3D画像取得
May, 12, 2023, Washington--水中で量子検出技術を使って3D画像を取得するプロトタイプLiDARシステムをヘリオットワット大学の研究チームは、初めて実証した。
このシステムの高感度により、水中の低光量条件でさえも詳細な情報を得ることができる。
UK、ヘリオットワット大学、Royal Academy of Engineering研究フェロー、Aurora Maccaroneは、「この技術は、幅広い範囲のアプリケーションで有用である」とコメントし射る。
海水を透して3D画像を取得すりのは、難しい。光量が限られており、水中の粒子が光を散乱させ、画像を歪めるからだ。しかし、量子ベースの技術、シングルフォトン検出は、極めて高い浸透性を可能にし、低光量条件でさえも機能する。
Optic Expressに発表された論文で、ヘリオットワット大学とエディンブルク大学の研究者は、大きな水槽に沈めたシングルフォトンLiDARシステム全体の実験を説明している。新技術は、チームの以前の実験、水中シングルフォトン検出と比較して実用的なアプリケーションに近づいている。実験は、水槽の外側に設置された光学セットアップで、注意深く管理された研究室条件で行われ、データ分析はオフラインで行われた。チームは、新しいハードウエアの開発、システムが取得した3D画像をリアルタイムで再構成するソフトウエアの開発を行った。
「この研究は、量子検出技術を水中アプリケーションで利用できるようにするものである。すなわち、われわれは、微光条件で関心のあるシーンを撮像できるようになる。これは、沖合のケーブルやエネルギーステーションの利用に影響を与える。この技術により、人がいなくても、モニタリングが可能になる。海洋環境で人が減り、侵襲的存在もすくなくなる」とMccaroneは、コメントしている。
微光検出の高速化
LiDARシステムは、シーンで物体からのレーザ光が反射して、システムのレシーバに戻るまでにかかる時間を計測することで画像を生成する、「時間飛行法」(ToF)である。新しい研究では、チームは、濁り水で見えにくくなり、従来のLiDARイメージングシステムでは見えないターゲットの3D画像を取得する方法を開発しようと考えた。
チームは、グリーンパルスレーザ光源を使い、関心のあるシーンを照射するLiDARシステムを設計した。反射されたパルス光は、シングルフォトンディテクタアレイによって検出される。これは、超高速微光検出を可能にするもので、極めて減衰の多い水のようなフォトンが少ない環境で計測時間を大幅に短縮する。
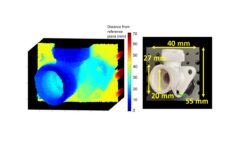
「ピコ秒分解能のToF計測を使うことで、われわれは、シーンのターゲットのミリメートル細部をごく普通に解像できる。われわれのアプローチにより、ターゲットによって反射されるフォトンと、水中の粒子によって反射されるフォトンを区別することができるので、光散乱が画像コントラストと解像を破壊する非常に濁った水中での3Dイメージングに、それは最適である」(Maccarone)。
このアプローチは、数千のシングルフォトンディテクタを必要とし、全てが1秒に数百のイベントを生成するので、短時間に3D画像を再構成するために必要なデータをとりだして処理することは難しい、特にリアルタイムアプリケーションの場合である。この問題を解決するために、チームは、高散乱条件でのイメージングに特化したアルゴリズムを開発し、それらを幅広く利用されているGPUハードウエアと連動させて適用した。
その新技術は、いくつかの重要な技術進歩に立脚している。「ヘリオットワット大学は、シングルフォトン検出技術、シングルフォトンデータの画像処理で長い実績があるので、極めて困難な条件で先進的シングルフォトンイメージングを実証することができた。エディンブルク大学は、シングルフォトンアバランシュダイオードディテクタアレイの設計と作製で基本的な前進を達成した。これによりわれわれは、量子検出技術をベースにしたコンパクトでロバストなイメージングシステムを構築することができた」(Maccarone)。



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
