






Science/Research 詳細
光ファイバ歪センサで義手をガイド
December, 14, 2016, NY--コーネル大学(Cornell University)研究チームは、人と全く同じように周囲環境を内的に感じるソフトロボットのための方法を考案した。
ほとんどのロボットは、モーターを利用して握る、接触感覚を実現しており、これは非常に大きく、しかも固い。
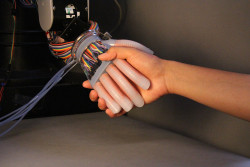
論文“Optoelectronically Innervated Soft Prosthetic Hand via Stretchable Optical Waveguides,”の筆頭著者、博士課程学生、Huichan Zhaoは、「われわれのセンサは体内に組み込まれており、センサはロボットの厚さを通して伝わる力を実際に検出することができる、これは例えば痛みを感じる時の人や全ての動物と同じである」とコメントしている。
光導波路は、多くのセンシング機能に使用されている。製造は当初複雑な工程であったが、ソフトリソグラフィや3Dプリンティングによって、簡単に製造してソフトロボットアプリケーションに組み込める弾性センサが開発された。
研究チームは、4段階ソフトリソグラフィを利用してコアとクラッドを作製し、LEDとフォトダイオードをそれに内蔵した。
義手が変形すればするほど、コアを通る光の損失がますます多くなる。フォトダイオードで検出される可変光損失によっと、義手はその周辺を「感知」できるようになる。「損失量は、曲げ方に依存している」と研究を指導するRobert Shepherd工学・航空工学准教授は言う。
グループは、オプトエレクトロニック義手を使って、つかむ、形状や構造のプローブなど、様々な作業を行った。中でも注目すべきは、その義手が3個のトマトをスキャンして、柔らかさから、どれが最も熟しているかを判断できたことであるる
(詳細は、www.cornell.edu)



![]()
関連雑誌: Laser Focus World, Laser Focus World China

Copyright © 2011-2021 e.x.press Co., Ltd. All rights reserved.
